Инерциальная навигационная система: как это работает

Долгое время отсутствие точной информации о местоположении самолета или вертолета было серьезным препятствием на пути развития авиации. Пилотам была необходима навигационная система, которая не зависела бы от земных ориентиров и капризов природы. Появление автономных инерциальных систем навигации стало большим шагом в истории авиации. Первые инерциальные системы в нашей стране были разработаны в 1960-х годах в Раменском приборостроительном КБ, входящем сегодня в концерн «Радиоэлектронные технологии» (КРЭТ) Госкорпорации Ростех.
В автономном полете
Первые пилоты в движении ориентировались по солнцу, звездам или компасу, затем появились радиосигналы, но все эти способы зависели от внешних факторов, а значит, не были полностью надежными. Требовался навигационный прибор, анализирующий движение самолета и не использующий внешние источники информации. Все необходимое оборудование должно быть размещено на борту самолета, а система должна функционировать полностью автономно.

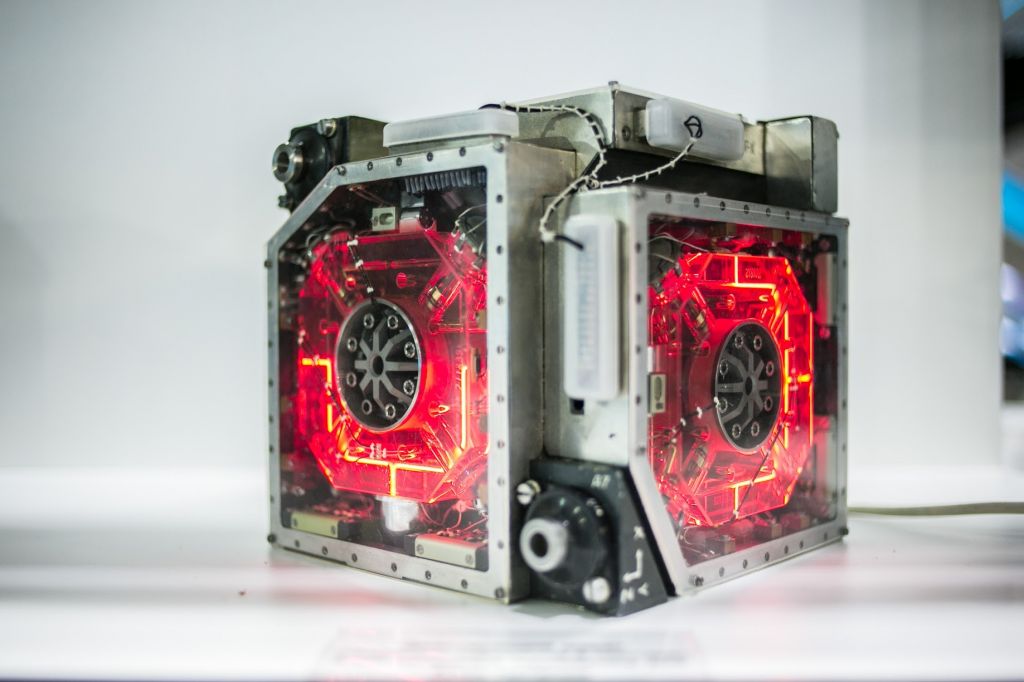
Бесплатформенная навигационная система БИНС-СП-1
Такой метод теоретически был разработан в 1930-е годы, но реализовать его удалось только спустя 20 лет. Инерциальная навигация основывается на применении законов механики, в частности на теории устойчивости механических систем, которую разрабатывали русские математики А.М. Ляпунов и А.В. Михайлов. Первые инерциальные навигационные системы (ИНС) были созданы в 1950-е годы в США и СССР. Они были довольно громоздкими и могли занимать все свободное пространство самолета. Современные ИНС изготавливаются с применением микроэлектронных технологий и занимают гораздо меньше места.
ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель.
Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
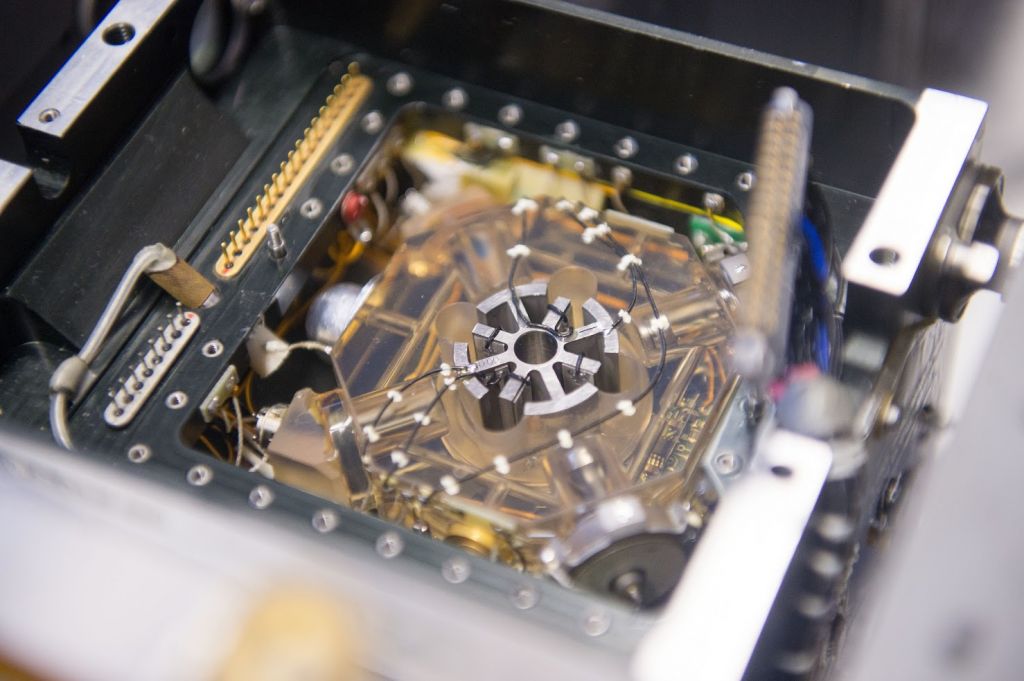
Лазерный гироскоп
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации. Еще одним относительным минусом ИНС является высокая стоимость входящего в их состав оборудования.
Авионика из Раменского
Инерциальные навигационные системы сегодня применяются не только в авиации. Их появление повлияло на развитие космонавтики, увеличилась дальность походов подводных лодок. ИНС используются в управлении морскими судами и баллистическими ракетами, применяются в геодезии. Также актуально применение подобных систем в беспилотных летательных аппаратах.

В 1960-е годы первые в СССР инерциальные навигационные системы для авиации были разработаны Раменским приборостроительным конструкторским бюро (РПКБ). Начиная с 1958 года специалистами РПКБ проводилось эскизное проектирование ИНС для различных классов и типов летательных аппаратов. Совершенствование чувствительных элементов – разработка поплавковых гироскопов и акселерометров, а затем динамически настраиваемых гироскопов – и применение цифровой вычислительной техники обеспечили создание и широкое применение ИНС.
К началу 1970-х годов предприятием были решены проблемы точного управляемого полета на большие расстояния. В дальнейшие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др. В 2012 году предприятие вошло в состав концерна «Радиоэлектронные технологии». Сегодня РПКБ – один из мировых лидеров в производстве авиационной электроники.
Источник статьи: http://rostec.ru/news/kak-eto-rabotaet-inertsialnaya-navigatsionnaya-sistema-/
Инерциальные навигационные системы: надежная навигация в любых условиях
Действующие лидирующие глобальные системы — ГЛОНАСС (Россия), GPS (США), Beidou (Китай), Galileo (Европа) — покрывают большую территорию земного шара и продолжают развиваться. Оборудование ГНСС производится массово с различными точностями и характеристиками, что позволяет любому заказчику выбрать оптимальный вариант для решения стоящей именно перед ним задачи.
Однако есть целый ряд случаев и применений, когда сигналы ГНСС не доступны, а решение задач навигации критически важно. Речь идет в первую очередь о наземном транспорте/объектах для ответственных применений (перевозка людей, ценных и опасных грузов), для строительной, лесной, карьерной и прочей специализированной техники, диагностических дорожных лабораторий:
- Пожарный автомобиль, въезжающий в горящий лес и не имеющий возможности из него выехать из-за отсутствия видимости от задымленности и неработоспособности ГНСС от листьев и веток деревьев. Риск гибели людей и техники.
- Невозможность мониторинга автомобиля в тоннеле с дорогостоящим ценным грузом, его отсечение от машин сопровождения и увод в ответвления злоумышленниками для совершения противоправных действий.
- Без навигации ГНСС для обеспечения правильной траектории движения остается рудничный добывающий комбайн при зарезании в пласт для добычи руды.
А еще сигналы ГЛОНАСС/GPS/Beidou могут умышленно глушиться или в них могут вноситься ошибки — так называемая спутниковая телепортация, когда объект виден на карте совсем не в том месте, где реально находится. Самое популярное такое место в Москве в районе Кремля, когда пользователи ГЛОНАСС/GPS отображаются на карте за пределами города в районе аэропорта Внуково.
Стоит ли говорить о важности навигации, вне зависимости от наличия ГНСС, для бурно развивающегося рынка беспилотных транспортных средств, которые уже в режиме тестирования десятками и сотнями передвигаются в ряде крупных городов России?
Это не фантазии и не выдержки из сценариев блокбастеров, а конкретные примеры из жизни, от которых страдают реальные пользователи и операторы.
Решать задачу навигации, в том числе высокоточной, автономной (при отсутствии сигналов ГНСС), непрерывной, призваны инерциальные навигационные системы (БИНС), в состав которых входят несколько акселерометров и гироскопов, а также сложная математика, программное обеспечение, методики калибровки, алгоритмия.
БИНС комплексируются с оборудованием ГНСС, и в случае отсутствия или ошибок в его сигналах навигация осуществляется инерциальным способом.
Компанией «Гиролаб» разработана и серийно выпускается линейка инерциальных навигационных систем на базе МЭМС, волоконно-оптических и кольцевых лазерных гироскопов.
На рис. 1 представлен ряд моделей БИНС МЭМС и ВОГ в различных исполнениях.

Рис. 1. Различные модели БИНС МЭМС и ВОГ
Помимо навигации, БИНС обеспечивают решение целого ряда других задач, заложенных в ее функционал:
- Навигация и мониторинг: обеспечение непрерывности и повышение надежности навигационного решения в проектах навигации и мониторинга транспорта/объектов при пропадании информации от ГНСС (глобальных спутниковых навигационных систем ГЛОНАСС/GPS/Beidou), например в тоннелях, лесах, гаражах, при глушении и внесении ошибок в сигнал ГНСС (спутниковая телепортация) и т. д., а также сглаживание информации от ГНСС, получая навигационную информацию с частотой до 600 раз в секунду. Уход навигационных параметров БЕЗ ГНСС составляет от 3% от пройденного пути (150 м на 5 км) до 0,2% от пройденного пути (10 м на 5 км) в зависимости от выбранной БИНС.
- Контроль, измерения и диагностика: возможность ведения журнала контроля движения для предотвращения и уменьшения аварийности, в процессе возникновения и развития аварийной ситуации («до», «во время», «после») с привязкой к координатам и угловым величинам и контроль многочисленных параметров и их превышений, таких как крены, тангажи, вибрации, опрокидывания, удары, осуществление контроля всех параметров, включая перегрузки в требуемом диапазоне («черный ящик»).
Задачи по второму пункту представляются не менее значимыми, чем инерциальная навигация. Так же как уведомление водителей о мониторинге транспорта посредством ГЛОНАСС/GPS дисциплинирует их и позволяет минимизировать «левые» рейсы, превышения скорости и т. д., так же и оснащение блоком БИНС позволяет уменьшить аварийность и/или иметь возможность детально воссоздать причины аварии и выявить виновников.
Возможность с достаточной точностью определять манеру и условия эксплуатации транспортных средств с привязкой к дорогам, по которым они передвигались, позволяет минимизировать спорные ситуации относительно необходимости гарантийного ремонта. Так, к нам обратилось предприятие, выпускающее прицепы для грузовых автомобилей, один из крупных заказчиков которого нещадно их эксплуатирует, постоянно допускает перегрузки и передвигается с неверно выбранными скоростными режимами по пересеченной местности, что приводит к поломкам из-за неправильной эксплуатации. Но заказчик требует от производителя выполнить дорогостоящий ремонт по гарантии. Чтобы избежать спорных ситуаций, производитель планирует устанавливать БИНС и указывать их применение в договорах, для использования в режиме «черного ящика» с фиксированием превышений значений по ударам, вибрациям и угловым значениям. Также по этим данным можно анализировать проседание прицепа (перегруз), по каким дорогам он передвигался и с какими скоростями (ровный асфальт, пересеченная местность и т. д.). В настоящее время проводятся испытания для анализа того, какие еще данные можно получать благодаря применению БИНС.
Оборудование производится в различных вариантах, в зависимости от задач и требований заказчика:
- от блока ИНС, который может быть объединен с уже имеющимся на объекте оборудованием спутниковой навигации (ГЛОНАСС/GPS/Beidou) и прочими системами с настройкой/подключением к штатному одометру одним из способов: посредством OBD-II-разъема, через интерфейс CAN и т. д;
- до «коробочного» решения под ключ, включающего ГЛОНАСС/GPS-оборудование по выбору заказчика, а также монтаж и настройку прочих дополнительных датчиков.
«Коробочное» решение является интегрированным инерциально-спутниковым навигационным и контрольно-измерительным комплексом по схеме на рис. 2.

Рис. 2. Схема «коробочного» решения
- Модульный подход. В комплекс уже заложены все необходимые элементы для простого подключения и начала эксплуатации с возможностью подключения различных внутренних и внешних ГНСС, БИНС и других модулей с различными характеристиками.
- Комплексирование БИНС и ГНСС.
- Запись любых параметров для дальнейшей обработки.
- Беспроводной канал связи на выбор (GSM, Wi-Fi, LoRa, Sat и т. д.).
- Возможность использования RTK-режима.
- Подключение к автомобильной CAN-сети.
- Стыковка с прочим различным оборудованием заказчика.
- Возможность выполнения пользовательских алгоритмов обработки данных на MCU.
- Платформа для поиска оптимальных решений и тестирования различного оборудования в контексте задач заказчика.
В основе комплексов лежат БИНС, по умолчанию оснащается БИНС МЭМС «ГЛ-ВГ110» с основными характеристиками, представленными в таблице 1.