- Ремонт и техническое обслуживание автомобилей
- Информирующие и исполнительные устройства ЭСУ автомобиля
- Информационные датчики ЭСУ
- Исполнительные устройства ЭСУ
- Исполнительный механизм
- Общий принцип действия исполнительных механизмов
- Виды исполнительных механизмов
- ROMAN996 › Blog › FAQ по датчикам и исполнительным механизмам (часть 1)
- Автомобильный справочник
- для настоящих любителей техники
- Исполнительные механизмы автомобиля
- Классификация исполнительных механизмов
- Электродинамические и электромагнитные преобразователи
- Силы в магнитном поле
- Электродинамический принцип
- Электромагнитный принцип
- Динамическая характеристика электромеханического привода
- Конструкции исполнительных механизмов
- Электромагнитные исполнительные механизмы
- Электродинамические исполнительные механизмы
- Применение исполнительных механизмов
- Пьезоэлектрические исполнительные механизмы
- Пьезоэлектрические материалы
Ремонт и техническое обслуживание автомобилей
Информирующие и исполнительные устройства ЭСУ автомобиля
Информационные датчики ЭСУ
Кислородные датчики (λ-зонды) — вырабатывают сигналы, амплитуда которых зависит от разницы содержания кислорода (О2) в отработавших газах двигателя и наружном воздухе. Устанавливаются до и после каталитического нейтрализатора в системе удаления отработавших газов.
Датчик положения коленчатого вала (СКР, ДПКВ) — информирует РСМ о положении коленчатого вала и оборотах двигателя. Данная информация используется процессором при определении моментов впрыска топлива и установке угла опережения зажигания.
Датчик положения поршней (CYP) — на основании анализа поступающих от датчика сигналов РСМ вычисляет положение поршня первого цилиндра и использует данную информацию при определении моментов и последовательности впрыска топлива в камеры сгорания двигателя.
Датчик ВМТ (TDC, датчик фаз, ДПРВ) — вырабатываемые датчиком сигналы используются РСМ при определении установок угла опережения зажигания в момент запуска двигателя.
Датчик температуры охлаждающей жидкости двигателя (ЕСТ, ДТОЖ) — на основании поступающей от датчика информации ЕСМ/РСМ осуществляет необходимые корректировки состава воздушно-топливной смеси и угла опережения зажигания, а также контролирует работу системы EGR.
Датчик температуры всасываемого воздуха (IAT) — РСМ использует поступающую от датчика IAT информацию при корректировках потока топлива, установок угла опережения зажигания и управлении функционированием системы EGR.
Датчик положения дроссельной заслонки (TPS, ДПДЗ) — расположен на корпусе дросселя и соединен с осью дроссельной заслонки. По амплитуде выдаваемого TPS сигнала РСМ определяет угол открывания дроссельной заслонки (управляется водителем от педали газа) и соответствующим образом корректирует подачу топлива во впускные порты камер сгорания. Отказ датчика, либо ослабление его крепления приводит к перебоям впрыска и нарушениям стабильности оборотов холостого хода.

Датчик абсолютного давления в трубопроводе (МАР) — контролирует вариации глубины разрежения во впускном трубопроводе, связанные с изменениями оборотов коленчатого вала и нагрузки на двигатель и преобразует получаемую информацию в амплитудный сигнал. РСМ использует поставляемую датчиками МАР и IAT информацию при тонких корректировках подачи топлива.
Барометрический датчик давления — вырабатывает амплитудный сигнал, пропорциональный изменениям атмосферного давления, который используется РСМ при определении продолжительности моментов впрыска топлива. Датчик встроен в модуль РСМ и обслуживанию в индивидуальном порядке не подлежит.
Датчик детонации — реагирует на изменение уровня вибраций, связанных с детонациями в двигателе. На основании поступающей от датчика информации РСМ осуществляет соответствующую корректировку угла опережения зажигания.
Датчик скорости движения автомобиля (VSS, ДСА) — информирует процессор о текущей скорости движения автомобиля.
Датчик величины открывания клапана EGR — оповещает РСМ о величине смещения плунжера клапана EGR. Полученная информация используется затем процессором при управлении функционированием системы рециркуляции отработавших газов.
Датчик давления в топливном баке — является составным элементом системы улавливания топливных испарений (EVAP) и служит для отслеживания давления паров бензина в баке. На основании поступающей от датчика информации РСМ выдает команды на срабатывание электромагнитных клапанов продувки системы.
Датчик-выключатель давления системы гидравлического усилителя руля (PSP) — на основании поступающей от датчика-выключателя PSP информации РСМ обеспечивает повышение оборотов холостого хода за счет срабатывания датчика IAC с целью компенсации возрастающих нагрузок на двигатель, связанных с функционированием рулевого гидроусилителя при совершении маневров.
Трансмиссионные датчики — в дополнение к данным, поступающим от VSS, РСМ получает также информацию от датчиков, помещенных внутрь коробки передач, либо подсоединенных к ней. К числу таких датчиков относятся: (а) датчик оборотов вторичного (коренного) вала и (b) датчик оборотов промежуточного вала.
Датчик-выключатель управления включением муфты сцепления кондиционера воздуха — при подаче питания от батареи к электромагнитному клапану компрессора К/В соответствующий информационный сигнал поступает на РСМ, который расценивает его как свидетельство возрастания нагрузки на двигатель и соответствующим образом корректирует обороты его холостого хода.
Исполнительные устройства ЭСУ
Главное реле PGM-FI (реле топливного насоса) — РСМ производит активацию реле топливного насоса при поворачивании ключа зажигания в положение «Start» или «Run». При включении зажигания активация реле обеспечивает подъем давления в системе питания.
Инжекторы впрыска топлива (электромагнитные форсунки) — РСМ обеспечивает индивидуальное включение каждого из инжекторов в соответствии с установленным порядком зажигания. Кроме того, модуль контролирует продолжительность открывания инжекторов, определяемую шириной управляющего импульса, измеряемой в миллисекундах и определяющей количество впрыскиваемого в цилиндр топлива.
Модуль управления зажиганием (ICM) — управляет функционированием катушки зажигания, определяя требуемое базовое опережение на основании вырабатываемых РСМ команд.
Клапан стабилизации оборотов холостого хода (IAC) — осуществляет дозировку количества воздуха, перепускаемого в обход дроссельной заслонки, когда последняя закрыта, либо занимает положение холостого хода. Открыванием клапана и формированием результирующего воздушного потока управляет РСМ.
Электромагнитный клапан продувки угольного адсорбера — является составным элементом системы улавливания топливных испарений (EVAP) и, срабатывая по команде РСМ, осуществляет выпуск скопившихся в адсорбере паров топлива во впускной трубопровод с целью сжигания их в процессе нормального функционирования двигателя.
Электромагнит управления продувкой угольного адсорбера — используется РСМ при проверке системой OBD-II исправности функционирования системы EVAP.
Источник статьи: http://k-a-t.ru/PM.01_mdk.01.02/7_elektro_diagnost_10/index.shtml
Исполнительный механизм
Исполнительный механизм — это устройство, преобразующее выходной сигнал регулятора в перемещение регулирующего органа. Исполнительные механизмы крайней распространены и используются повсеместно не только в промышленности, но и в быту.
 Исполнительный механизм
Исполнительный механизм
Общий принцип действия исполнительных механизмов
Обычно исполнительные механизмы состоят из трех основных частей: привод, прибор для управления приводом и регулирующий орган — задвижки. Привод обеспечивает изменение положения задвижки, а задвижка корректирует величину переменной процесса.
За счет подвода энергии извне исполнительный механизм развивает усилие и мощность, достаточные для перемещения регулирующего органа в положение, соответствующее командному сигналу. Например, исполнительный механизм может использоваться, чтобы изменить степень открытия клапана для увеличения или уменьшения загрузки, или изменить положение заслонки или жалюзи.
Виды исполнительных механизмов
Существуют разные виды исполнительных механизмов, которые, в свою очередь, имеют подвиды. Их конструкция и принцип действия отличаются друг от друга. В зависимости от вида энергии, используемой для создания перестановочного усилия, исполнительные механизмы разделяют на пневматические, гидравлические и электрические.
Тип исполнительного механизма, который используется на конкретном производстве, зависит от многих факторов, включая особенности технологического процесса, действие, которое должно быть выполнено и требуемую скорость реагирования.
Источник статьи: http://www.kipiavp.ru/pribori/ispolnitelniy-mehanizm.html
ROMAN996 › Blog › FAQ по датчикам и исполнительным механизмам (часть 1)

Здесь описаны датчики и исполнительные механизмы применяемые в ЭСУД. Кратко описан принцип действия и методы проверки, без применения спец. и диагностического оборудования, если это возможно. Доступные каждому, кто имеет мультиметр и\или БК.
Датчики
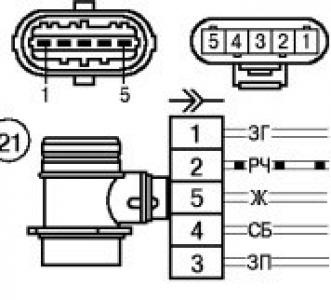
1. ДМРВ На автомобилях семейства ВАЗ-2110 устанавливаются датчики массового расхода воздуха термоанемометрического типа.

Чувствительный элемент датчика представляет собой тонкую пленку, на которой расположено несколько температурных датчиков и нагревательный резистор. В середине пленки находится область подогрева, степень нагрева которой контролируется с помощью температурного датчика. На поверхности пленки со стороны потока воздуха и с противоположной стороны симметрично расположены еще два термодатчика, которые при отсутствии потока воздуха регистрируют одинаковую температуру. При наличии потока воздуха первый датчик охлаждается, а температура второго остается практически неизменной, вследствие подогрева потока воздуха в зоне нагревателя. Дифференциальный сигнал обоих датчиков пропорционален массе проходящего воздуха. Электронная схема датчика преобразует этот сигнал в постоянное напряжение, пропорциональное массе воздуха.Важно, чтоб датчик оставался в чистоте, так-как загрязнение вызовет искажение показаний датчика.Так-же он требователен к качеству фильтрации всасываемого воздуха, так-как попавшая пыль, пролетая через датчик, режет плёнку чувствительного элемента. Что приводит к безвозвратному выходу датчика из строя.
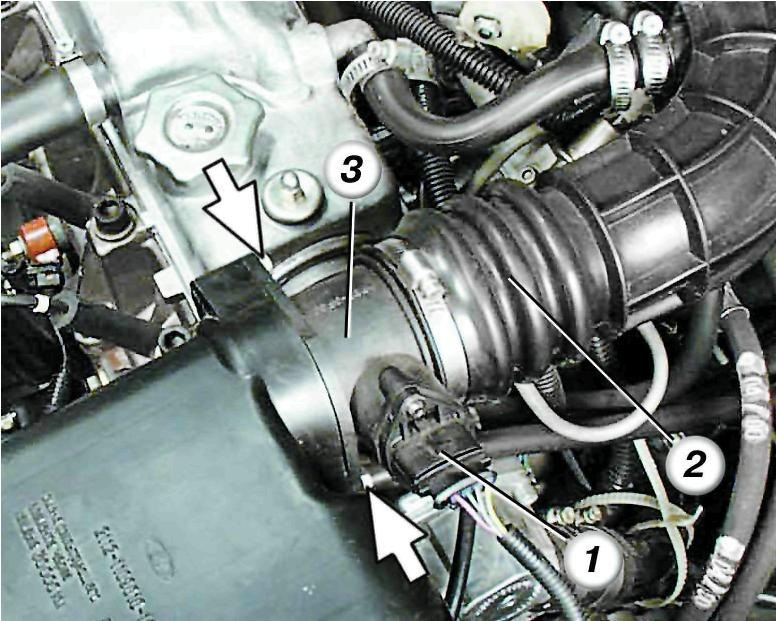
Устанавливается датчик здесь…
Итак о проверке…
Проверка заключается в измерении напряжения покоя датчика, то-есть напряжения, которое выдаёт датчик, при включённом зажигании, но не запущенном двигателе. Измерение можно проводить как с помощью БК, так и с помощью обычного мультиметра. Лучше конечно если мультиметр будет не самый дешевый и китайский.
Если установлен БК, нужно посмотреть параметры каналов АЦП(аналого-цифрового преобразователя).Для проверки ДМРВ мультиметром, аккуратно прокалывая проводку разъёма датчика, измеряем напряжение между 3(масса ДМРВ) и 5(сигнал) контактами.
2. Датчик кислорода(ДК) или Лямбда-Зонд.



Метод проверки заключается в том, что при прогретом двигателе, с помощью мультиметра(лучше аналогового-стрелочного) наблюдается изменение напряжения.Если изменений нет, при исправных цепях и прогреве датчика, а напряжение лежит выше или ниже указаного предела, то датчик «отравлен» и подлежит замене.Так-же следует учесть, что многие дешевые мультиметры, обладают большой инерционностью и не позволят произвести точное измерение из-за часто меняющегося напряжения(аналоговый(стрелочный) мультиметр сдесь выигрывает).Но изменение контролировать удастся…
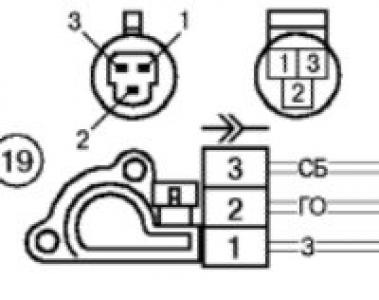
3. Датчик температуры охлаждающей жидкости(ДТОЖ)
Датчик температуры охлаждающей жидкости представляет собой термистор, т.е. резистор, электрическое сопротивление которого изменяется в зависимости от температуры. Термистор, расположенный внутри датчика имеет отрицательный температурный коэффициент сопротивления, т.е. при нагреве его сопротивление уменьшается.


Датчик представляет собой потенциометр, на один конец которого подаётся плюс напряжения питания (5 В), а другой конец соединен с массой.С третьего вывода потенциометра(от ползунка) идёт выходной сигнал к контроллеру.Когда дроссельная заслонка поворачивается(от воздействия на педаль управления), изменяется напряжение на выходе датчика.При закрытой дроссельной заслонки оно ниже 0.7 В.Когда заслонка открывается, напряжение на выходе датчика растёт и при полностью открытой заслонки должно быть более 4 В.Отслеживая выходное напряжение датчика контроллер корректирует подачу топлива в зависимости от угла открытия дроссельной заслонки(т.е. по вашему желанию).Датчик положения дроссельной заслонки не требует никакой регулировки, т.к. контроллер самостоятельно определяет минимальное напряжение датчика и принимает его за нулевую отметку.
К сожалению без применения осциллографа не возможно определить состояние датчика, но можно хотя-бы проверить функционирование датчика.
При плавном нажатии на педаль газа, на БК должно меняться процентное открытие заслонки(0% открытия-1%-2%-3% и так далее), а при измерении напряжения на разъёме датчика,
между контактами 1(масса датчика) и 2(сигнал ДПДЗ), напряжение должно меняться плавно без скачков.Если на БК происходит перескакивание % открытия(1%-2%-8%-3%), а на мультиметре просходят скачки напряжения, стоит задуматься о его замене…
5.Датчик положения коленчатого вала(ДПКВ)
ДПКВ, самый важный датчик ЭСУД.Система управления может функционировать без любого датчика, кроме ДПКВ.Если он неисправен двигатель не запустится.

ДПКВ подаёт в контроллер сигнал частоты вращения и положения коленчатого вала.Этот сигнал представляет собой серию повторяющихся электрических импульсов напряжения, генерируемых датчиком при вращении коленчатого вала.На базе этих импульсов контроллер управляет форсунками и системой зажигания.
Источник статьи: http://www.drive2.com/b/278980
Автомобильный справочник
для настоящих любителей техники
Исполнительные механизмы автомобиля
Исполнительные механизмы (конечные элементы управления) формируют связь между электрическим сигналом процессора и реальным воздействием. Они преобразуют маломощные сигналы, передающие информацию о расположении элементов исполнения в рабочие сигналы соответствующего для процесса управления энергетического уровня. Вот о том, какими бывают исполнительные механизмы автомобиля, мы и поговорим в этой статье.

Конверторы сигнала объединены с элементами усилителя для того, чтобы использовать физические принципы преобразования, управляющие взаимосвязью между различными формами энергии (электрической-механической-жидкостной-тепловой).
Классификация исполнительных механизмов
Исполнительные механизмы классифицируются по типу преобразования энергии. Энергия, получаемая от источника, преобразуется в энергию магнитного или электрического поля, или превращается в тепло. Принцип получения воздействующей силы, определяемый этими формами энергии, основан на использовании силовых полей или некоторых специфических характеристик материалов.
Магнитострикционные материалы делают возможным разработать исполнительные механизмы для применения в диапазоне микроперемещений. К этой категории также относятся пьезоэлектрические исполнительные механизмы, изготавливаемые по многослойной технологии аналогично керамическим конденсаторам, и используются для высокоскоростных топливных форсунок. Тепловые исполнительные механизмы зависят исключительно от характеристик конкретных материалов.
Исполнительные механизмы в автомобиле в основном представляют собой электромагнитомеханические преобразователи и электрические сервоприводы, линейные и роторные электромагнитные исполнительные механизмы. Исключением является пиротехническая система надувания подушек безопасности. Соленоидные исполнительные механизмы могут быть самостоятельными сервоэлементами или выполнять управляющие функции, направляя работу силового устройства, например, гидромеханического.
Электродинамические и электромагнитные преобразователи
Силы в магнитном поле
Различие между электродинамическим и электромагнитным принципами действия исполнительного механизма вытекает из способа создания сил в магнитном поле. Общей для обоих принципов является магнитная цепь, формируемая магнитомягким материалом и катушкой для возбуждения магнитного поля. Главное различие заложено в величине самой силы, создаваемой в устройстве при технически доступных условиях. В одинаковых условиях сила, создаваемая путем применения электромагнитного принципа, оказывается больше в 40 раз. Электрическая постоянная времени для исполнительного механизма этого типа сравнима с механическими постоянными времени. Оба принципа создания сил применяются в механизмах линейного и роторного привода.
Электродинамический принцип
Электродинамический принцип основан на силе, действующей на подвижный заряд или проводник с током в магнитном поле (сила Лоренца, рис. а, «Электродинамические и электромагнитные преобразователи» ). Катушка или постоянный магнит генерируют постоянное магнитное поле. Электрическая энергия, предназначенная для получения силы, прикладывается к подвижной обмотке ротора (плунжер или иммерсионная катушка). Высокая точность исполнительного механизма достигается особенностью конструкции обмотки ротора, имеющей малую массу и низкую индуктивность. Два аккумулирующих элемента, один на закрепленном, другой на подвижном компоненте, вырабатывают силы, действующие в двух направлениях через реверсирование тока в обмотках якоря и возбуждения.
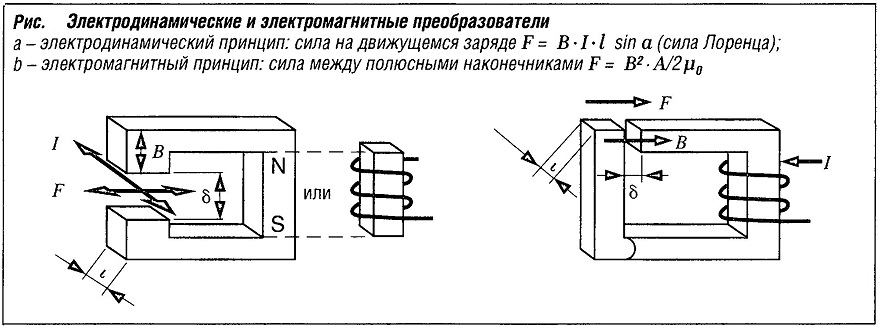
Вторичное поле, создаваемое током якоря в разомкнутой магнитной цепи, размагничивает последнюю. Можно сказать, что сила (момент) электродинамического исполнительного механизма примерно пропорциональна току и не зависит от перемещения.
Электромагнитный принцип
Электромагнитный принцип базируется на взаимном притяжении (рис. Ь, «Электродинамические и электромагнитные преобразователи» ) мягких ферромагнетиков в магнитном поле. Электромагнитные исполнительные механизмы оснащаются только одной катушкой, создающей поле и потребляющей энергию, идущую на преобразование. Для повышения индуктивности катушка оснащена железным сердечником. Однако, поскольку сила пропорциональна квадрату магнитной индукции, устройство работает только в одном направлении, поэтому требуется возвратный элемент, пружину или магнит.
Динамическая характеристика электромеханического привода
Динамическая характеристика или отклик на включение электромеханического привода описывается дифференциальным уравнением для электрических схем и уравнениями Максвелла, по которым определяется зависимость силы тока от перемещения.
Электрическая цепь, как правило, состоит из индуктора с активным сопротивлением. Одним из средств улучшения динамической характеристики является перевозбуждение индуктора в момент активизации, в то время как уменьшение тока может быть ускорено стабилитроном. В любом случае улучшение характеристики достигается за счет дополнительных расходов и потерь в электронных средствах запуска исполнительного механизма.
Диффузия поля является одним из сдерживающих факторов, на который трудно влиять в приводах с высокими динамическими характеристиками. Операции быстрого переключения сопровождаются высокочастотной пульсацией поля в магнитомягком материале магнитной цепи привода. Эти колебания, в свою очередь, наводят вихревые токи, нарастание и затухание магнитного поля. Результирующая задержка в нарастании и уменьшении сил может быть сокращена только выбором материала с низкой электрической проводимостью и проницаемостью.
Конструкции исполнительных механизмов
Выбор конструкции определяется условиями работы (например, требованиями к динамической характеристике).
Электромагнитные исполнительные механизмы
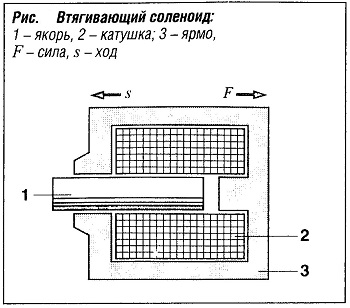
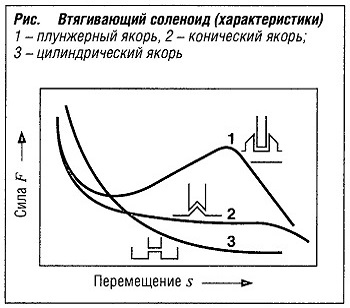
Электромагнитный исполнительный механизм поступательного движения имеет соленоид (рис. «Втягивающий соленоид» ) с втягивающей силой, уменьшающейся пропорционально квадрату перемещения (рис. «Втягивающий соленоид (характеристики)» ). Форма кривой определяется типом рабочего зазора (например, конического или иммерсионного якоря).
 |  |
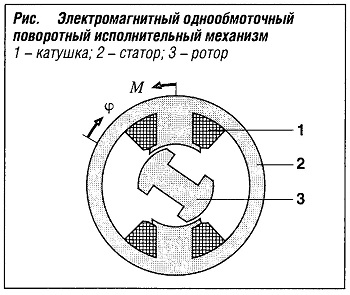
Роторные электромагнитные исполнительные механизмы характеризуются определенным расположением полюсов в статоре и роторе (например, роторный исполнительный механизм с одной обмоткой, рис. «Электромагнитный однообмоточный поворотный исполнительный механизм» ). Когда ток прикладывается к одной из катушек, то роторные и статорные полюсы притягиваются и возникает крутящий момент.
Электродинамические исполнительные механизмы
Куполообразный магнит (исполнительный механизм с иммерсионной катушкой, рис. «Электродинамический привод с иммерсионной катушкой» ) функционирует, когда цилиндрическая иммерсионная катушка (обмотка якоря) движется в заданном рабочем зазоре.
 | 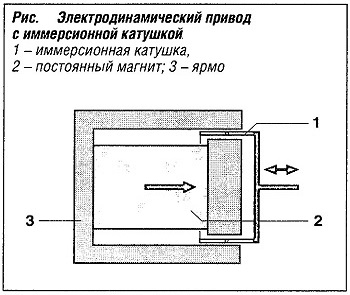 |
Диапазон перемещения определяется осевым размером обмотки якоря и рабочим зазором.
Применение исполнительных механизмов
Электромеханические исполнительные механизмы являются элементами непосредственного управления. Они служат для превращения электрического сигнала в механическое перемещение или работу без какого-либо промежуточного устройства преобразования. Типичное применение — перемещение заслонок, катушек и клапанов. Описываемые приводы не обладают способностью к самовозврату, так как не имеют устойчивой рабочей точки. Они способны выполнять только позиционные операции из постоянного исходного положения (рабочая точка), в том случае, если приложена противодействующая сила, например, возвратная пружина.
Электромагнитный сердечник обеспечивает устойчивую статическую рабочую точку, когда его кривая «сила-ход» накладывается на характеристическую реакцию возвратной пружины. Изменение тока катушки в электромагнитном клапане смещает рабочую точку. Простое позиционирование достигается путем управления током. Однако здесь особое внимание необходимо уделить нелинейности характеристики «сила-ток» и чувствительности системы позиционирования к помехам, например, механическому трению, пневматическим и гидравлическим силам. Температурная чувствительность сопротивления катушки приводит к погрешностям позиционирования, что делает необходимым корректирующее управление током. Высокоточная система позиционирования с хорошей динамической реакцией должна иметь датчик положения и контроллер.
Пьезоэлектрические исполнительные механизмы
Принцип действия пьезоэлектрических исполнительных механизмов, основан на прямом пьезоэлектрическом эффекте, открытом в 1880 году братьями Кюри на кристаллах турмалина — преобразовании механической деформации кристалла в напряжение на поверхности кристалла, прямо пропорциональное этой деформации.
 Обратный пьезоэлектрический эффект называется непрямым пьезоэлектрическим эффектом. При подаче напряжения на пьезоэлектрический материал происходит быстрая направленная деформация (отклонение) материала на несколько мкм, что можно использовать в качестве активирующего движения.
Обратный пьезоэлектрический эффект называется непрямым пьезоэлектрическим эффектом. При подаче напряжения на пьезоэлектрический материал происходит быстрая направленная деформация (отклонение) материала на несколько мкм, что можно использовать в качестве активирующего движения.
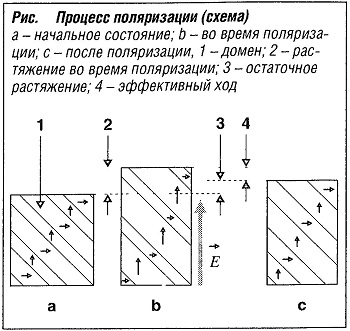
Необходимым условием для реализации пьезоэлектрического эффекта являются электрические диполи в базисных клетках материала, которые в результате процессов взаимодействия образуют более крупные соединенные области той же ориентации, по аналогии с магнетизмом называемые доменами (рис. а, «Процесс поляризации» ). Когда в привилегированном направлении действует магнитное поле, преобладающая доля этих доменов может быть выстроена в направлении поля, где электрические диполи в доменах одновременно удлиняются (расширение кристаллической решетки, рис. Ь, «Процесс поляризации» ). Там материал демонстрирует макроскопическую линейную деформацию в процессе поляризации.
Даже после деактивации поля и соответствующего восстановления диполей, домены остаются в этом выстроенном (поляризованном) состоянии (рис. с, «Процесс поляризации» ), так что пьезоэлектрический материал может снова и снова обратимо расширяться в привилегированном направлении при воздействии магнитного поля.
Пьезоэлектрические материалы
Пьезоэлектрические материалы — это подкатегория диэлектриков; иными словами, они являются электрически непроводящими, неметаллическими материалами без свободных мобильных носителей заряда. Наряду с первыми изученными пьезоэлектрическими монокристаллами, такими как турмалин и кварц, стало известно большое количество поликристаллических пьезоэлектрических материалов, включая множество керамических.
В силу небольшой удельной линейной деформации пьезоэлектрических кристаллов, для технического применения пьезоэлектрического эффекта годятся лишь материалы, которые особенно эффективно преобразуют электрическую энергию в механическую. Это свойство можно описать коэффициентом соединения к- отношением механической энергии в пьезоэлементе к общей энергии (0 Q heat = Q 1 p 1 — Q2 p 2
В случае с несжимаемыми жидкостями:
Турбулентность возникает там, где жидкость протекает через участки ограничений для движения потока (например, через дроссели). Скорость потока среды тогда не зависит в значительной мере от вязкости. С другой стороны, вязкость не играет той роли, как при ламинарном течении в узких трубках и отверстиях.
Гидромеханические усилители (рис. «Гидромеханические исполнительные механизмы» ) управляют преобразованием энергии из жидкого в механическое состояние. Регулирующий механизм должен конструироваться для управления только относительно малым потоком энергии, необходимым для окончательного позиционирования клапанов.
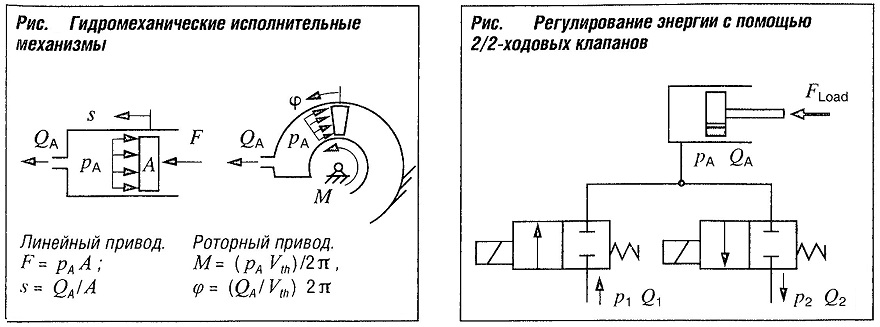
С помощью переключающих клапанов открывается (закрывается) отверстие, управляющее потоком к (от) гидромеханического преобразователя энергии (рис. «Регулирование энергии с помощью 2/2 — ходовых клапанов» ). При достаточном открытии отверстия дроссельные потери остаются незначительными. Для получения возможности непрерывного управления гидромеханизмом с фактическим отсутствием потерь может использоваться модулированная продолжительность импульса открытия и закрытия. Однако в действительности флуктуации давления и механический контакт между компонентами клапана создают нежелательные шум и вибрацию.
Источник статьи: http://press.ocenin.ru/ispolnitelnye-mehanizmy-avtomobilya/