Кинематические уравнения движения
Кинематические уравнения движения используются, чтобы описать перемещение объекта в пространстве. Так как при поступательном движении все точки объекта движутся одинаково, то его удобно представлять материальной точкой: она имеет определенную массу, однако её размерами можно пренебречь. Чтобы количественно описать движение точки, нужно ввести временную и пространственные координаты. При поступательном движении удобней всего пользоваться декартовой системой координат.
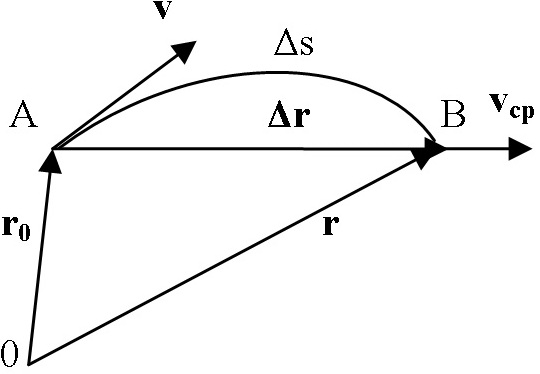
Положение такой точки в пространстве описывается радиус-вектором:

Можно спроектировать его на оси координат, тогда получим систему скалярных уравнений. Эти уравнения и называют кинематическими уравнениями движения:

Характеристики кинематического уравнения движения
Длина пути точки, пройденного ею с начального момента до момента t, обозначается  и является скалярной величиной. Если движение прямолинейное, то вектор перемещения
и является скалярной величиной. Если движение прямолинейное, то вектор перемещения  , соединяющий начальное и конечное положение точки, совпадает с путем точки,
, соединяющий начальное и конечное положение точки, совпадает с путем точки,  . Если же движение криволинейное,
. Если же движение криволинейное,  обычно находят с помощью геометрических построений.
обычно находят с помощью геометрических построений.
Длина пути, пройденная точкой за конечное время t, может быть найдена с помощью формулы:
Здесь v – функция изменения скорости точки во времени,  — начальная скорость, а – ускорение, t – время.
— начальная скорость, а – ускорение, t – время.
Если движение равномерное, то есть скорость остается неизменной, пройденный путь можно найти проще:

Скорость – величина векторная; она характеризует не только быстроту движения точки, но и направление этого движения. Она направлена так же, как и вектор перемещения. Средняя скорость может быть рассчитана:

Если интервал времени  , вектор перемещения стремится к тому, чтобы совпадать с путем перемещения, и тогда может быть вычислена мгновенная скорость:
, вектор перемещения стремится к тому, чтобы совпадать с путем перемещения, и тогда может быть вычислена мгновенная скорость:
Ускорение точки (в векторном или скалярном виде) мы узнаем, взяв производную от скорости по времени:
Если движение криволинейно, ускорение можно разложить на две составляющие: тангенциальное ускорение  и центростремительное ускорение
и центростремительное ускорение  :
:



где R – это радиус кривизны рассматриваемой траектории. Модуль ускорения, включающего обе компоненты, при криволинейном движении:
Если движение имеет прямолинейный характер, ускорение имеет только тангенциальную составляющую.
Примеры решения задач
| Задание | Задана материальная точка, которая перемещается вдоль оси абсцисс. Движение совершается по закону: х = 4 + 2t – 0,5t 3 . Для t = 2 c найдите координату этой точки, её мгновенные скорость и ускорение. |
| Решение | 1) Найдём координату точки, воспользовавшись уравнением движения: |
 м.
м.
2) Вычислим производную от уравнения движения и найдём мгновенную скорость точки:


3) Вычислим производную от уравнения скорости, чтобы найти мгновенное ускорение:


 м,
м,  м/с,
м/с,  м/с
м/с 
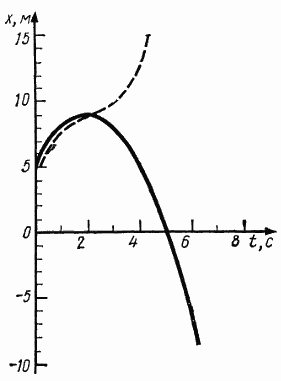
| Задание | Материальная точка движется по оси Х. Пусть её движение совершается по закону: х = 5 + 4t – t 2 . Нужно построить график функций, отображающих зависимость пути s и координаты х от времени. Найдите среднюю скорость, а также среднюю скорость пути за отрезок времени от t1 = 1 c до t2 = 6 с. |
| Решение | Чтобы построить требуемый график, найдём начальную и самую большую из достигнутых координаты, после чего найдем моменты времени, соответствующие этим координатам, а также координате х = 0. |
В начальной координате объект находится в момент времени t = 0. Её значение:
х (t = 0) = 5 + 4t – t 2 = 5 + 4•0 – 0 2 = 5 м.
Из уравнения движения видим, что ускорение точки (заданное последним слагаемым) отрицательное. Значит, скорость уменьшается, и максимальная координата будет достигнута в тот момент, когда скорость начнёт менять знак. Найдём скорость как первую производную, взятую от уравнения движения, и приравняем ее к нулю:

Отсюда t = 2 c – момент, когда координата будет максимальной. Найдём эту координату:
х (t = 2) = 5 + 4t – t 2 = 5 + 4•2 – 2 2 = 9 м.
Найдём момент времени, когда координата х = 0:
х = 5 + 4t – t 2 = 0.
Решив это квадратное уравнение, получим корни: t1 = 5 c, t2 = -1 c. Последний результат отбрасываем, как нефизический.
Поскольку график, выражающий зависимость координаты от переменной времени, представляет собой кривую линию второго порядка, то в него входят пять разных коэффициентов. Поэтому найдём координаты еще для двух значений времени:
х (t = 1) = 5 + 4t – t 2 = 5 + 4•1 – 1 2 = 8 м.
х (t = 6) = 5 + 4t – t 2 = 5 + 4•6 – 6 2 = -7 м.
За этими данными мы можем начертить график для координаты. График пути строим за предыдущим графиком следующим образом:
1) До того, как скорость изменит свой знак, графики пути и координаты повторяют друг друга;
2) Начиная с момента, когда скорость изменит свой знак, путь возрастает по той же функции, по какой убывает координата.
Вычислим среднюю скорость за отрезок времени от t1 = 1 c до t2 = 6 с:

Чтобы найти среднюю путевую скорость, найдём путь, пройденный точкой за интервал времени от t1 = 1 c до t2 = 6 с. Этот путь складывается из двух отрезков пути – до и после перемены знака скорости:
Источник статьи: http://ru.solverbook.com/spravochnik/uravneniya-po-fizike/kinematicheskie-uravneniya-dvizheniya/
Уравнение движения автомобиля
Уравнение движения автомобиля выражает связь между движущими силами и силами сопротивления движению и позволяет определить режим движения автомобиля в любой момент.
Для вывода уравнения движения используется схема движения автомобиля на подъем и рассматривается разгон автомобиля на подъеме (рис. 4.1).
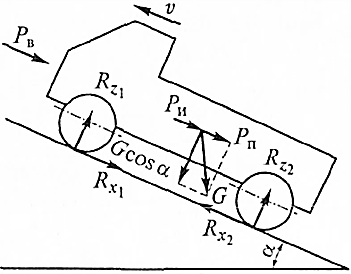
Рисунок 4.1 – Схема сил, действующих на автомобиль на подъеме
Проекция всех сил, действующие на автомобиль на поверхность дороги:
 | (4.1) |
Подставим в формулу (4.1) касательные реакции дороги Rх1 и Rх2, объединим члены с коэффициентом сопротивления качению f и члены с ускорением j и, принимая во внимание соотношения f (Rzl + Rz2) = Pк. При этом учтем, что jk1 + jk2 = jk ,а также принимая во внимание коэффициент учета вращающихся масс, получим уравнение движения автомобиля в общем виде:  .
.
Принимая во внимание, что силы сопротивления качению Рк и подъему Рп в совокупности представляют силу сопротивления дороги Рд, получим:
 | (4.2) |
При установившемся (равномерном) движении, когда нет разгона и Ри = 0:
 | (4.3) |
Из уравнения (4.3) следует, что безостановочное движение автомобиля возможно только при условии:
 | (4.4) |
Данное неравенство связывает конструктивные параметры автомобиля с эксплуатационными факторами, обусловливающими сопротивление движению, и не гарантирует отсутствия буксования ведущих колес. Безостановочное движение автомобиля без буксования ведущих колес возможно лишь при соблюдении условия:
 | (4.5) |
Условие равномерного движения при отсутствии буксования ведущих колес записывается в виде:
 | (4.6) |
| | | следующая лекция ==> | |
| Сила и мощность сопротивления разгону | | | Силовой баланс автомобиля |
Дата добавления: 2017-06-02 ; просмотров: 2269 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/9-18882.html
Кинематические уравнения движения
ВВЕДЕНИЕ
Основная задача физики – это установление устойчивых связей между физическими величинами, измеренных с помощью приборов в принятых единицах.
Для построения системы физических единиц произвольно выбирают единицы для нескольких не зависящих друг от друга физических величин. Эти единицы называются основными. Остальные же величины и их единицы выводятся из законов, связывающих эти величины и их единицы с основными. Они называются производными.
Мы будем использовать систему физических единиц интернациональную (система СИ).
В СИ выбраны семь величин (длина, масса, время, сила тока, температура, количество вещества, сила света) и для них установлены основные единицы измерения физических величин: метр, килограмм, секунда, ампер, кельвин, моль, кандела.
В механике мы будем использовать пять основных единиц:
Масса — килограмм (кг) — масса, равная массе международного прототипа килограмма (платиноиридиевого цилиндра, хранящегося в Международном бюро мер и весов в Севре, близ Парижа).
Длина пути — метр (м) — длина пути, проходимая светом в вакууме за 1/299792458 с.
Время — секунда (с) — время, равное 9.192  10 9 периодам излучения, возникающего между уровнями основного состояния атомов Cs-133 .
10 9 периодам излучения, возникающего между уровнями основного состояния атомов Cs-133 .
Радиан (рад) — угол между двумя радиусами окружности, длина дуги между которыми равна радиусу.
Стерадиан (ср) — телесный угол с вершиной в центре сферы, вырезающий на поверхности сферы площадь, равную площади квадрата со стороной, равной радиусу сферы.
Пример производной единицы измерения скорости: из формулы равномерного прямолинейного движения V = s / t единица скорости получается равной 1 м/с (здесь V — скорость, s — пройденный путь, t — время).
Используемые в физике величины бывают двух видов:
Скаляр — величина, характеризуемая числовым значением (она может быть положительной и отрицательной).
Вектор — величина, характеризуемая как числовым значением (модуль вектора, положительное число), так и направлением.
МЕХАНИКА
Механика — раздел физики, изучающий закономерности механического движения.
Механическое движение — это изменение с течением времени взаимного расположения тел или их частей.
Классическая механика (механика Ньютона) — изучает законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света в вакууме (с ≈ 3 10 8 м/с).
Релятивистская механика — изучает законы движения макроскопических тел со скоростями, сравнимыми со скоростью света в вакууме.
Квантовая механика — изучает законы движения микроскопических тел (отдельных атомов, элементарных частиц)
Классическая механика делится на три раздела:
Кинематика — изучает движение тел, не рассматривая причины этого движения.
Динамика — изучает причины движения тел.
Статика — изучает законы равновесия системы тел.
КЛАССИЧЕСКАЯ МЕХАНИКА
Кинематика материальной точки
Материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь.
Произвольное макроскопическое тело или систему тел можно условно разбить на малые части, каждая из которых рассматривается как материальная точка, а изучение произвольной системы сводится к изучению системы материальных точек.
Кинематические уравнения движения
Движение тела происходит в пространстве и во времени.
Положение материальной точки определяется в система отсчета — совокупность системы координат и часов.
Мы будем использовать декартову систему координат, в которой положение точки в данный момент времени задается тремя координатами x, y, z или радиусом-вектором  , проведенным из начала системы координат в данную точку (см. рис. 1).
, проведенным из начала системы координат в данную точку (см. рис. 1).

При движении материальной точки ее координаты с течением времени изменяются и ее движение определяется либо скалярными кинематическими уравнениями движения
либо векторными кинематическим уравнением движения  .
.
Исключая в этих уравнений время, получим уравнение траектории — линии, описываемой материальной точкой в пространстве.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Плоская траектория – если она располагается в одной плоскости.
Мы будем рассматривать только плоские траектории.
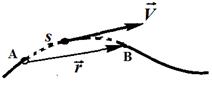
Длина пути s – это длина участка траектории, пройденного материальной точкой с момента начала движения (на рис. 2 она показана пунктиром), она является скалярной функцией времени s(t).
ds – бесконечно малый путь. Единица измерения пути [s, ds] = [м].
Перемещение  — это вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени.
— это вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени.
Модуль перемещения: | | = r, dr – бесконечно малое перемещение.
Единица измерения перемещения [r, dr] = [м]
При прямолинейном движении модуль перемещения r равен пройденному пути s.
1.2. Скорость
Скорость  — это векторная величина,характеризующая как быстроту движения, так и его направление в данный момент времени.
— это векторная величина,характеризующая как быстроту движения, так и его направление в данный момент времени.
Мгновенная скорость (скорость в данный момент времени) 
и вектор мгновенной скорости направлен по касательной к траектории в сторону движения (для прямолинейного движения вектора и сонаправлены).
Модуль мгновенной скорости  . Единица измерения скорости [V] = [м/с].
. Единица измерения скорости [V] = [м/с].
Для равномерного движения (V = const) V = s/t, где s – путь, пройденный за время t.
При неравномерном движении вводится скалярная величина — средняя скорость = Ds/Dt, где  – длина пути, пройденного материальной точкой за время
– длина пути, пройденного материальной точкой за время  , si – длина пути, пройденного материальной точкой за время t i
, si – длина пути, пройденного материальной точкой за время t i
Правило сложения скоростей: если система отсчета 1, в которой движется тело с постоянной скоростью V1, сама движется относительно системы отсчета 2 со скоростью V2, то скорость тела относительно системы отсчета 2 равна векторной сумме векторов V1 и V2.
Ускорение
Ускорение  — векторная величина, характеризующая быстроту изменения скорости по модулю и направлению. Мгновенное ускорение
— векторная величина, характеризующая быстроту изменения скорости по модулю и направлению. Мгновенное ускорение  .
.
При ускоренном прямолинейном движении вектора скорости и ускорения сонаправлены, при замедленном прямолинейном движении эти вектора противонаправлены.
При криволинейном движении точки вектор ускорения отклонен от касательной к траектории в сторону ее вогнутости: при ускоренном движении угол между векторами скорости и ускорения острый, а при замедленном движении – тупой (рис. 3).


Модуль ускорения  , единица измерения [a] = [м/с 2 ].
, единица измерения [a] = [м/с 2 ].
Для равноускоренного движения:  ,
,
где Vо и V – скорости в начальный и конечный момент движения, t – время движения.
Для плоской траектории можно выделить два направления – касательную к траектории (орт  ) и главную нормаль (орт
) и главную нормаль (орт  ). Тогда вектор можно разложить на два вектора, направленных вдоль этих направлений:
). Тогда вектор можно разложить на два вектора, направленных вдоль этих направлений:
Вектор  называется тангенциальным (касательным) ускорением, он направлена по касательной к траектории (как и скорость) и характеризует быстроту изменения скорости по модулю. При ускоренном движении вектор сонаправлен с вектором скорости, а при замедленном движении эти векторы противонаправлены (рис. 4).
называется тангенциальным (касательным) ускорением, он направлена по касательной к траектории (как и скорость) и характеризует быстроту изменения скорости по модулю. При ускоренном движении вектор сонаправлен с вектором скорости, а при замедленном движении эти векторы противонаправлены (рис. 4).
Вектор  называется нормальным (центростремительным) ускорением, он направлена по нормали к траектории к центру кривизны траектории и характеризует быстроту изменения скорости по направлению
называется нормальным (центростремительным) ускорением, он направлена по нормали к траектории к центру кривизны траектории и характеризует быстроту изменения скорости по направлению  , здесь r – радиус кривизны траектории (если траектория окружность, то r – радиус окружности). Естественно
, здесь r – радиус кривизны траектории (если траектория окружность, то r – радиус окружности). Естественно  .
.
Правило сложения ускорений
Если тело движется с постоянным ускорением а1 в системе отсчета 1, а система 1 движется с постоянной скоростью относительно системы 2, то ускорение тела относительно системы отсчета 2 равна а1.
Виды движения
В зависимости от величин a t и an может быть девять видов движения.
Наиболее важные виды движения:
1.4.1. Прямолинейное равномерное движение: a t = 0, an = 0,
кинематическое уравнение движения s = Vt, V = s / t
s – путь, пройденный за время t.
1.4.2. Прямолинейное равноускоренное (равнозамедленное) движение: a = const, an= 0, кинематические уравнения движения
V = V o ± at, 
здесь Vo — скорость в начальный момент времени, V – скорость в момент времени t, s – пройденный путь, t – время движения.
1.4.3. Равномерное движение по окружности: a t = 0, an = сonst
(хотя an = сonst, но направление вектора изменяется, т.е. это ускоренное движение).
Угловая скорость есть векторная величина, модуль которой  (здесь d j — бесконечно малый угол поворота материальной точки за бесконечно малый промежуток времени dt).
(здесь d j — бесконечно малый угол поворота материальной точки за бесконечно малый промежуток времени dt).
Вектор  направлен вдоль оси вращения по правилу правого винта (рис. 5).
направлен вдоль оси вращения по правилу правого винта (рис. 5).


Единица измерения угловой скорости [ω] = [рад/с] .
Период вращения Т – время одного полного оборота.
Частота вращения ν – число оборотов за 1 секунду, единица измерения частоты [ν, ω] =[c -1 ] = [Гц].
Имеет место соотношения:  .
.
Для равномерного движения по окружности w = const
и кинематическое уравнение j = wt.
1.4.4. Равноускоренное движение по окружности: a t = const, an = сonst;
Угловое ускорение − векторная величина, модуль которой  ,
,
причем вектор углового ускорения cонаправлен вектору угловой скорости при ускоренном движении и противонаправлен ему при замедленном движении (рис. 6).
Единица измерения [ε] = [рад/с 2 ].
Кинематические уравнения равнопеременного движения по окружности: ω = ωo ± εt,  ,
,
где wo — начальная угловая скорость.
Связь между линейными и угловыми величинами: 
1.5. Тело, брошенное под углом α к горизонту с начальной скоростью Vo [Для самостоятельной работы]

 ;
; 
 ,
, 
 ,
, 
в точке падения скорость тела равна по абсолютной величине скорости тела в точке бросания, а направление ее составляет тот же угол, что и в точке бросания (взятый с противоположным знаком);
время подъема (= времени падения)  ,
,  ,
,
 , .
, .
Тело, брошенное горизонтально, будет двигаться по одной из ветвей параболы с вершиной в точке бросания.
Дата добавления: 2019-02-26 ; просмотров: 1500 ; Мы поможем в написании вашей работы!
Источник статьи: http://studopedia.net/13_49916_kinematicheskie-uravneniya-dvizheniya.html