Критическая скорость по условиям управляемости
При повороте на автомобиль действует центробежная сила, результирующая которой приложена к центру масс. Для ее определения, рассмотрим плоскую модель движения автомобиля по горизонтальной дороге (рис. 9.1), считая, что шины в поперечном направлении не деформируются.
На участке дороги (1-2) автомобиль движется прямолинейно. На участке (2-3) водитель поворачивает колеса, и автомобиль движется по кривой переменного радиуса. На участке (3-4) управляемые колеса повернуты на угол θ и остаются неизменными, а радиус R траектории середины заднею моста остается постоянным. На участке (4-5) водитель поворачивает колеса в обратную сторону, и радиус R постепенно увеличивается.
Далее, на участке (5-6), автомобиль опять движется прямолинейно.
К переднему мосту приложена толкающая сила Р (рис. 9.1), продольная составляющая которой Рх1 при равномерном движении равна силе сопротивления качению (Рх1 = G1 f), а поперечная – (Py1 = Pf1 tg θ = G1 ftg θ).
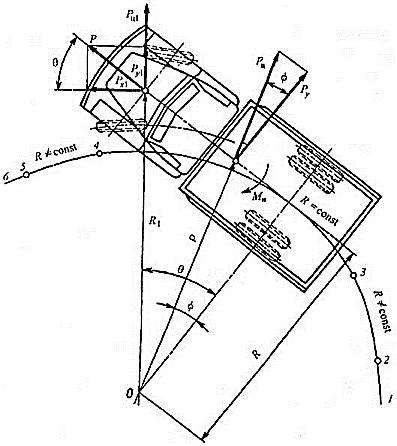
Рисунок 9.1– Движение автомобиля на повороте
На передний мост действует также центробежная сила передней части автомобиля Рц1, направленная вдоль радиуса R1 поворота середины переднего моста. Учитывая соотношения V1= VR1/R; R1 = R/cos θ, можно определить силу инерции:
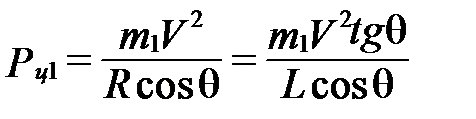 | (9.1) |
где т1– масса автомобиля, приходящаяся на передний мост, кг;
V – скорость движения середины переднего моста, м/с.
θ – угол между продольной осью автомобиля и вектором скорости середины переднего моста (полусумма углов поворота управляемых колес);
L – база автомобиля.
Силы Py1 и Ρц1 стремятся вызвать боковое скольжение управляемых колес и чтобы колеса катились без скольжения, необходимо соблюдение следующего условия:
 | (9.2) |
Сила Рц1 прямо пропорциональна квадрату скорости, поэтому скольжение наиболее вероятно при большой скорости движения автомобиля.
Критической скоростью по условиям управляемости Vynp называют скорость, с которой автомобиль может двигаться на повороте без поперечного скольжения управляемых колес. Ели скорость движения автомобиля больше Vynp, то управляемые колеса при повороте проскальзывают в поперечном направлении.
Эту скорость можно определить из соотношения:
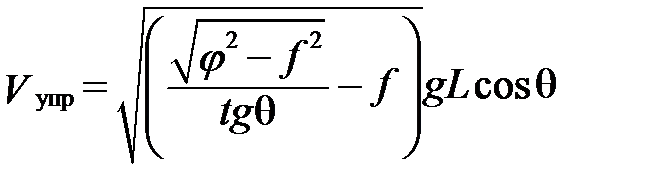 | (9.3) |
Чем меньше радиус поворота автомобиля, тем меньше должна быть скорость движения.
Дата добавления: 2016-02-27 ; просмотров: 2993 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/7-20717.html
Критическая скорость автомобиля по уводу
Для нахождения критической скорости автомобиля по уводу определим изменение угла поворота управляемых колес автомобиля в зависимости от скорости его движения. С этой целью выразим угол поворота управляемых колес из формулы для радиуса поворота автомобиля с эластичными колесами:
где 
 углы увода передних и задних колес; Pу1, Pу2— боковые силы, действующие на передний и задний мосты;
углы увода передних и задних колес; Pу1, Pу2— боковые силы, действующие на передний и задний мосты;
kув1, kув2 — коэффициенты сопротивления уводу передних и задних колес.
С учетом значений боковых сил углы увода колес
где G1, G2— вес, приходящийся на передние и задние колеса, Н; v — скорость автомобиля, км/ч.
У автомобиля с недостаточной поворачиваемостью при увеличении скорости возрастают разность углов увода δ2 и δ1 и, следовательно, угол поворота θ управляемых колес. При этом угол поворота управляемых колес всегда остается положительным.
У автомобиля с излишней поворачиваемостью при увеличении скорости движения угол поворота управляемых колес θ уменьшается. При определенной скорости разность углов увода  .
.
Эта скорость называется критической по уводу.
При движении с критической скоростью по уводу достаточно небольшого бокового возмущения (наезд на неровность дороги,
порыв ветра и др.), чтобы возник прогрессивно возрастающий увод, и двигавшийся прямолинейно автомобиль стал круто поворачиваться.
Так как сначала автомобиль двигался прямолинейно и угол поворота управляемых колес был равен нулю (θ = 0), то с учетом предыдущих выражений можно записать

Обозначив v = vув,определим критическую скорость автомобиля по уводу, км/ч:

Критической скоростью по уводу называется скорость, по достижении которой при любом боковом возмущении начинается прогрессивное отклонение автомобиля от направления движения, заданного управляемыми колесами.
Из формулы для vувследует, что критическую скорость по уводу имеют только автомобили с излишней поворачиваемостью. У автомобилей с нейтральной и недостаточной поворачиваемостью критическая скорость по уводу отсутствует, так как при δ1 = δ2 она равна бесконечности, а при δ1 > δ2 имеет отрицательное значение.
Управление автомобилем с излишней поворачиваемостью затруднено, и такой автомобиль менее безопасен, чем автомобиль с недостаточной поворачиваемостью. Так, при скорости автомобиля, равной критической по уводу (v = vув),для движения по кривой траектории управляемые колеса нужно устанавливать в нейтральное положение, а при скорости, большей критической по уводу (v > vув),управляемые колеса необходимо поворачивать в сторону, противоположную повороту. Все это нарушает управляемость автомобиля и затрудняет работу водителя, так как данный недостаток он вынужден устранять поворотом управляемых колес.
Итак, наиболее безопасными являются автомобили с недостаточной поворачиваемостью. Они устойчивы при прямолинейном движении, при действии боковой силы располагают резервом «под-руливания» на поворотах и не имеют критической скорости по уводу. Чем больше недостаточная поворачиваемость автомобиля, тем меньше утомляется водитель.
Чрезмерно большая поворачиваемость автомобиля затрудняет работу водителя, так как для изменения направления движения требуется большая сила. Обеспечить нейтральную поворачиваемость
автомобиля очень сложно. В связи с этим стремятся делать автомобили с недостаточной поворачиваемостью.
Недостаточная поворачиваемость достигается уменьшением давления воздуха в шинах передних колес по сравнению с задними, вследствие чего снижается их сопротивление уводу и увеличивается угол увода δ1; расположением центра тяжести автомобиля ближе к оси передних колес, что увеличивает действие центробежной силы на передние колеса и угол δ1 увода передних колес; разной конструкцией подвески колес автомобиля: передняя независимая, а задняя зависимая; применением переднего привода.
Источник статьи: http://studopedya.ru/2-67210.html
Увод колеса и поворачиваемость автомобиля
При наличии достаточной силы сцепления между шиной и дорогой эластичное колесо, нагруженное поперечной силой, может катиться без скольжения под некоторым углом к своей средней продольной плоскости. Такое качение называется уводом колеса, а угол, образованный вектором скорости центра колеса с этой плоскостью, – углом увода колеса δув.
Угол увода колеса можно определить по формуле:
 | (9.4) |
где kув – коэффициент сопротивления уводу колеса, Н/рад, показывающий, какую по величине силу нужно приложить к колесу, чтобы оно катилось с углом увода, равным 1 рад.
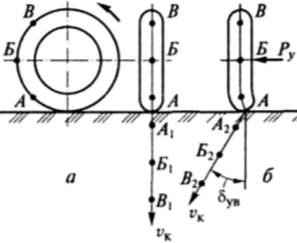
Рисунок 9.2 – Качение эластичного колеса при отсутствии (а) и действии (б) боковой силы
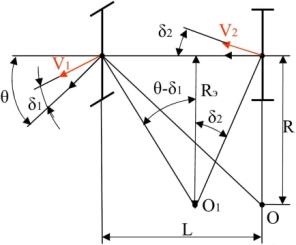
Поворачиваемость – свойство автомобиля изменять направление движения без поворота управляемых колес. Основные причины поворачиваемости: увод колес, вызываемый эластичностью шин; поперечный крен кузова, связанный с эластичностью подвески автомобиля. В зависимости от соотношения углов увода передних и задних колес (мостов) автомобиль может иметь нейтральную, недостаточную и излишнюю поворачиваемость.
Нейтральная поворачиваемость характеризуется тем, что углы увода передних и задних колес равны (δ1 = δ2), и, следовательно, Rэ = R. Однако траектории движения автомобиля с жесткими шинами не совпадает с траекторией движения автомобиля с эластичными шинами (рис. 9.3, а). В этом случае вследствие увода центр поворота находится не в точке О, как у автомобиля с жесткими шинами, а в месте пересечения перпендикуляров к векторам скоростей переднего и заднего мостов (точка О1).
 а а | 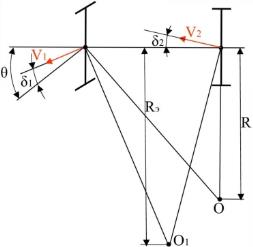 б б | 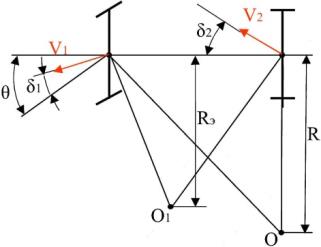 в в |
Рисунок 9.3 – Схемы движения автомобиля с различной степенью поворачиваемости: а – нейтральная; б – недостаточная; в – избыточная
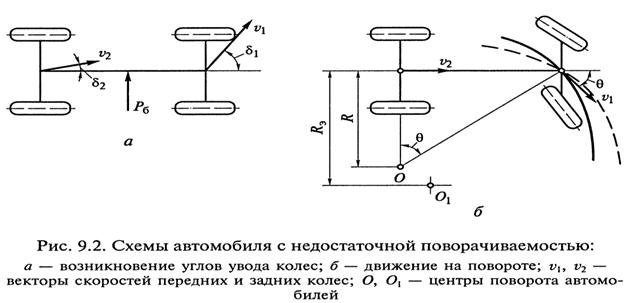
Недостаточная поворачиваемость характеризуется тем, что угол увода передних колес больше, чем угол увода задних колес (δ1 > δ2), и Rэ > R. Для движения автомобиля с недостаточной поворачиваемостью по траектории заданного радиуса управляемые колеса необходимо повернуть на больший угол, чем при жестких колесах (рис. 9.3, б). Следовательно, автомобиль с недостаточной поворачиваемостью безопасен при движении на повороте, так как у него имеется некоторый резерв «подруливания».
Излишняя поворачиваемость характеризуется тем, что угол увода передних колес меньше, чем угол увода задних колес (δι δ2 имеет отрицательное значение.
Для количественной оценки шинной поворачиваемости автомобиля применяют коэффициент поворачиваемости ηпов, равный:
 | (9.6) |
При излишней поворачиваемости (ηпов > 1), при нейтральной – (ηпов = 1), а при недостаточной – (ηпов
Дата добавления: 2016-02-27 ; просмотров: 7578 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/7-20718.html
Определение критической скорости автомобиля по условию управляемости.
Увод автомобильного колеса. Коэффициент сопротивления боковому
уводу и факторы, влияющие на него.
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рис. 8.4) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Угол 5ув, образованный вектором скорости vK колеса и плоскостью его качения, называется углом увода.
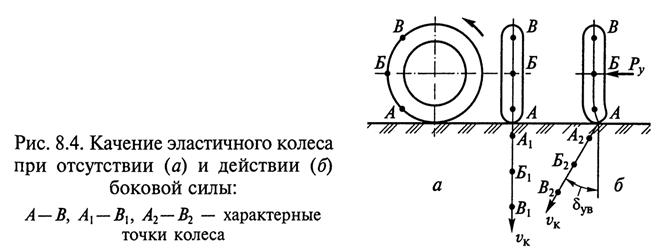 На рис. 8.5 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4. 6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Рy = Рсц (δув = 12. 15°).
На рис. 8.5 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4. 6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Рy = Рсц (δув = 12. 15°).
Угол увода колеса можно определить по формуле:
где kув — коэффициент сопротивления уводу колеса.
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рис. 8.6). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30. 100 кН/рад, а для шин легковых автомобилей — 15. 40 кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение.
Поворачиваемость автомобиля.
В зависимости от соотношения углов увода передних и задних колес (мостов) автомобили могут иметь различную поворачиваемость: нейтральную, недостаточную и излишнюю.
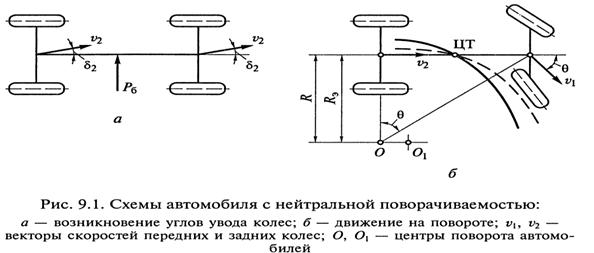
 Нейтральная поворачиваемость (рис. 9.1, а) характеризуется тем, что углы увода передних и задних колес равны (δ1= δ2) и, следовательно, радиусы поворота автомобилей с нейтральной пово- рачиваемостью и жесткими колесами тоже равны, т.е. Rэ = R (рис. 9.1, б). Хотя радиусы поворота Rэ и R равны, траектории движения автомобилей с нейтральной поворачиваемостью и жесткими колесами не совпадают, так как центры их поворота находятся в разных точках (О и O1).
Нейтральная поворачиваемость (рис. 9.1, а) характеризуется тем, что углы увода передних и задних колес равны (δ1= δ2) и, следовательно, радиусы поворота автомобилей с нейтральной пово- рачиваемостью и жесткими колесами тоже равны, т.е. Rэ = R (рис. 9.1, б). Хотя радиусы поворота Rэ и R равны, траектории движения автомобилей с нейтральной поворачиваемостью и жесткими колесами не совпадают, так как центры их поворота находятся в разных точках (О и O1).
Недостаточная поворачиваемость (рис. 9.2, а) характеризуется тем, что угол увода передних колес больше, чем задних (δ1 > δ2), и R3> R. Для движения автомобиля с недостаточной поворачиваемостью (рис. 9.2, б) по траектории заданного радиуса управляемые колеса необходимо повернуть на больший угол, чем при жестких колесах, так как на повороте он стремится двигаться по кривой большего радиуса, чем определяемый положением передних управляемых колес. Следовательно, автомобиль с недостаточной поворачиваемостью безопасен при движении на повороте, так как у него имеется некоторый резерв «подруливания».
Излишняя поворачиваемость (рис. 9.4, а) характеризуется тем, что угол увода передних колес меньше, чем задних (δ1
Дата добавления: 2018-05-13 ; просмотров: 599 ; Мы поможем в написании вашей работы!
Источник статьи: http://studopedia.net/5_70379_opredelenie-kriticheskoy-skorosti-avtomobilya-po-usloviyu-upravlyaemosti.html