- Как обслуживать автомобиль
- Траектория движения автомобиля
- К сожалению, уверенность в прохождении траектории движения автомобиля любой сложности это ложное ощущение, так как против законов физики не попрешь, что может привести к выбрасыванию автомобиля с проезжей части.
- Рассмотрим силы действующие на автомобиль при прохождения сложного участка и как поведет себя его траектория движения автомобиля.
- Уроки вождения. Что такое траектория и зачем она нужна?
- Траектория, теория и прочее
- VII Международная студенческая научная конференция Студенческий научный форум — 2015
- РАСЧЕТ ФОРМЫ ТРАЕКТОРИИ ТРАНСПОРТНОГО СРЕДСТВА И ПРИНЦИП РУЛЕВОГО УПРАВЛЕНИЯ АККЕРМАНА
Как обслуживать автомобиль
Траектория движения автомобиля
Необходимо обязательно учитывать один очень важный аспект, а именно, то что в современных автомобилях уровень комфорта зашкаливает, водитель садится в автомобиль и погружается в своеобразное пространство, свой мир, перед ним появляется экран компьютера, а в качестве рулевого колеса выступает джойстик. Это все заставляет доверять своему автомобилю больше чем нужно, ведь он сам тебе говорит, что он способен пройти повороты любой сложности по любой траектории движения автомобиля.
К сожалению, уверенность в прохождении траектории движения автомобиля любой сложности это ложное ощущение, так как против законов физики не попрешь, что может привести к выбрасыванию автомобиля с проезжей части.
Рассмотрим силы действующие на автомобиль при прохождения сложного участка и как поведет себя его траектория движения автомобиля.
Любой автомобиль имеет свою массу. Для того, чтобы оказать воздействие и изменить направление движения автомобиля необходимо приложить большую силу. Сила должна быть равно пропорциональна изменению характеру движения.
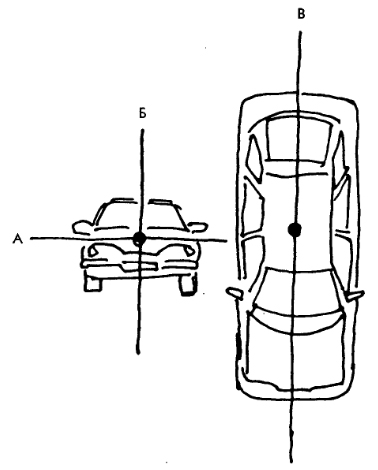
Силы, которые воздействуют на автомобиль в движении проходят через 3 оси:
Кузов располагается на четырех пружинах, поэтому движение одной стороны кузова вверх, в то время как противоположная сторона опускается вниз понять легко. Это объясняется тем, что пружины имеют свойство сжиматься и разжиматься. Во время поворота происходит крен автомобиля и сцепление с покрытием дороги начинает увеличиваться, но вместе с тем на внутренние части колес давление веса уменьшается, вследствие того, что часть его ушла на наружные стороны колес, что в свою очередь влечет динамическое перемещение колеса. Соответственно сцепление с дорогой уменьшилось. Крен автомобиля зависит от таких весьма важных параметров, как: ширина шины, центра тяжести, конструкции подвески и амортизаторов.
Поэтому болиды Формулы-1 выполняют в такой форме, что они не кренятся даже на поворотах с большой скоростью. Побороть влияние таких факторов удалось за счет специальной коротко ходовой подвески и широких колес, также на болиды устанавливают жесткие пружины и стабилизаторы поперечной устойчивости.
Источник статьи: http://www.autoezda.com/pravuladorryhy/757-treat.html
Уроки вождения. Что такое траектория и зачем она нужна?
Здравствуйте, у микрофона Егор Васильев.
Сегодня мы с вами поговорим о траектории. Естественно, управляя автомобилем мы в любом случае выбираем ту или иную траекторию движения. И практически всегда ее форма продиктована особенностями дороги или полосы в которой мы движемся. Однако, здесь существуют нюансы которые могут сделать совершение маневра опасным или наоборот гарантированно успешным. Естественно, что речь идет о поворотах, поскольку при движении по прямой все более менее понятно. Траектория это линия в пространстве или в нашем случае на плоскости, по которой движется описываемая центром масс автомобиля, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве относительно выбранной системы отсчёта. Существенно, что понятие о траектории имеет физический смысл даже при отсутствии какого-либо по ней движения.
Так вот, знаем мы про нее или нет она любом случае присутствует. Правда в результате правильного построения траектории мы даже в в сложных условиях можем совершить маневр без потерь. Или наооборот, в безобидной ситуации потерять автомобиль и покинуть проезжую часть с печальным и непонимающим взглядом. Применительно к автомобилю траектория характеризуется простым набором параметров. Первый — это заход или ширина захода. Этот термин описывает величину смещения автомобиля от внутренней обочины дороги к внешней на подходе к повороту. Когда это смещение максимально мы говорим о широком заходе, а если на подходе к повороту мы прижались к внутренней обочине, то захода просто нет. Этот параметр является очень важным, поскольку позволяет пилоту при широком заходе получить пологую, а значит и безопасную дугу. Причем, существует простая закономерность. Чем круче поворот, тем больше филина захода, А по мере того, как поворот становится более пологим можно позволить себе использовать менее широкие заходы. Однако, одного захода мало.
Для того чтобы вам удалось правильно построить безопасную траекторию необходимо выбрать точное положение точки входа. Точка входа это точка в которой мы начинаем поворот руля для начала маневра. Она может быть ранней или поздней. Конечно существует множество нюансов ее правильного выбора, однако есть общее правило, которое связывает расположение точки входа со скоростью прохождения поворота поворота. Че выше скорость тем раньше располагается точка входа. Впрочем, эти правила описывают траекторию в идеальном мире, где асфальт всегда одинаково ровный, чистый и имеет один и тот же коэффициент сцепления. В реальном мире все не так. И если на оптимальной траектории расположена яма, то не стоит упорствовать в ее соблюдении. Просто снижаем скорость и ищем уже не идеальную, а оптимальную траекторию прохождения поворота. И разница между этими понятиями весьма велика. Но об этом мы поговорим в следующий раз.
Источник статьи: http://echo.msk.ru/programs/auto/2609356-echo/
Траектория, теория и прочее
КОМПАНИЯ BR ENGINEERING
Проверь себя в тесте!
Пора объясниться. О пользе гоночной теории не будем, польза её очевидна на любом этапе, но чем раньше, тем лучше. Обычно, я не обсуждаю ничего с людьми, которые не читали гоночную теорию. Это бесполезный разговор получается. Я опубликовал гоночную теорию в 2006 году и уверен, что до этого момента только избранные знали про «апекс» или «трайлбрейкинг». Я ничего не изобретал, просто изложил простым и понятным языком со своими примерами мировую гоночную теорию, которая сформировалась в середине 60-х годов, которую я изучил по первоисточникам на английском и немецком языках.
Итак, начнём с того, что академическая основа гоночной теории — это кольцо. Если хотите, то это потому что там всё стабильно, то есть отсутствуют отягчающие вождения субстанции, ямы, холмы-трамплины, колея, и прочие неожиданности. Кольцевая теория, это онова основ и её базисные принципы годятся для любого вида автоспорта. Потому что физика движения одна для всех. Конечно, рассматривать траектории для трассы ралли, это абсурд, потому что там важнее фишки, а они могут быть и в каждом повороте и в целом на отдельных участках трассы. Выигрывает тот, кто фишки понял и использовал в свою пользу при прочих равных. Моя книга по гоночной теории начинается с теста, то есть вопросов. Они начального уровня. Мой последний тест, – для продвинутых. Не стоит бояться своих результатов. Я охотно посылаю всем желающим объяснение правильных ответов.
При этом, первый вопрос про траекторию. Есть ли определение что такое «идеальная траектория»? Я не встречал чёткого определения, хотя, изучил много трудов по изложению гоночной теории многих авторов, встречал даже со множеством математичесмких формул… Правильный ответ в этом вопросе взят из, на мой взгляд, самого удачного варианта изложения гоночной теории, американского тренера Росса Бентли. Он же дает определение «геометрической траектории», для того, чтобы дилетантам, а он пишет для американцев, часто туповатых, было быстро и просто понятно, чем отличается гоночная траектория от той, по которой они с сигарой в одной руке и колой в другой проходят повороты, которых так мало на хайвеях. Итак, всему голова – кольцевая гоночная теория. Поэтому, в своё время было ошибочным рассуждать про спортивное вождение, перепрыгнув через «кольцевую гоночную теорию», сразу жёстко приземлившись в ралли и набив себе шишок.
Первая шишка, это термин «вкатывание» и он годится только как фигура речи, потому что «вкатывания» в гонках не бывает! Я прочёл ещё в начале 70-х в умной книге, что есть два способа прохождения поворотов на гонках: «фоур вилс дрифт» и «пауэр слайд», то есть скольжение всеми четырьмя колёсами и силовой занос. Тот, кто серьёзно, без применения фигуры речи говорил о том, что кольцевики «вкатывают», ни разу не ездил на кольце и понятия не имеет как там ездят. Кольцевики, конечно же, используют приём скольжение всеми четырьмя колёсами. Тех кто «вкатывает» зовут чайниками и ждут их на финише круга до седин.
Многие, и имя им легион, считали и считают до сих тор, что ралли, — это «пауэр слайд»! Вальтер Рёрль, так же как в своё время француз, горнолыжник Жан Клод Килли, который внезапно выиграл, благодаря новой революционной технике, когда он поехал на паралелльных лыжах с горы, попёр в ралли, используя «фоур вилс дрифт», а не «пауэр слайд». Он признавался, что это очень сложно и требует воли и дисциплины, а от себя я разовью его мысль и добавлю, что это ещё и очень страшно. Понятно почему, не хочу писать банальностей, я же не для американцев пишу. Откуда у Рёрля появилась эта шальная идея? Так он же в 1980 году, когда стал выигрывать у всех на ралли не секунды, а минуты, принял участие в Чемпионате мира по кольцевым гонкам на выносливость. Так же и Лёб, воспользовался фишкой Рёрля и каждый сезон выезжал на кольцевые гонки. Итак, разобрались, что «вкатывание», это даже не в магазин за водкой, потому что и туда ездят быстрее, особенно, если тубы горят! А есть ли третий способ? Есть! И я им владел ещё в 1980 году.
Это «трайлбрейкинг», который самые быстрые использовали на иделальном для этого приёма московском ипподроме. Ты летишь на полном газу, впереди вираж и бетонный забор, но ты бодро проскакиваешь все точки торможения и не отпускаешь полный газ. Абсурд? Нет! Ты вдруг резко бросаешь газ, и машина, словно по мановению волшебной палочки, сама встаёт боком, так как это самое эффективное торможение! Анатолий Брум, мой тренер по ипподромным приёмам так мне и говорил: «Самое эффективное торможение, это боком!» То есть, первая половина поворота, это снижение скорости, далее идёт разгон! И это самый эфективный расклад в повороте. Английский тренер Роб Уильсон разаработал методику применения такого приёма на кольце, то есть исключил фазу «прокатываения», как не эффективную ( конечно, это работает не во всех поворотах).
Я об этом пишу в своей последней книге «Стена упала» и мы подробно рассматривали его приём на вебинаре, который я проводил в ВШЭ по образовательной программе «менеджмент и предпринимательство в автоспорте». Господин Уильсон рассказывал в «зумме» целых два часа о своей методике, которая включает ещё две фишки. Конечно, в моём тесте есть и вопросы по этому материалу и ответить правильно, не имея в распоряжении этого вебинара или не читая мою книгу сложно. Потому что, приёмы гоночного вождения совершенствуются, выкидываются устаревшие постулаты. Например, понятие «мышечная память», это тоже, на мой взгляд, фигура речи, так же как и «рефлексы», потому что на самом деле, человек руководит своими руками и ногами через нейронные связи, идущие из мозга. Их посылает «ментальная программа», записанная на «мозговой жёсткий диск». Так есть ли «мышечная память»? Есть! Но, только у культуристов, когда они вдруг прерывают тренировки на несколько месяцев, при их возобновлении мышцы опять растут и становятся точно такими по форме, как были раньше…
С рефлекасми всё ясно, они на уровне собаки Павлова, и это самый примитивный, низовой уровень, а вождение автомобиля, особенно спортивное, намного сложнее и работа пилота складывается из многих факторов. Вообще-то, не особо хочется останавливаться на обсуждении «сенсационного приёма загрузки передних колёс», чтобы, якобы лучше зайти в поворот, так как сцепление передних шин резко возрастает. Потому что резкая загрузка передних, это есть, не что иное, как внезапная разгрузка задних, которую сопровождает мощный занос задницы автомобиля, то есть вход в поворот на полностью разбалансированном автомобиле. Ничего из вышеупомянутого в мировой теории ни разу не упоминалось… Кстати, говоря, динамическому балансу и его влиянию на управляемость, внимание ранее у советских пионеров гоночной теории, практически не уделялось. А это важный раздел гоночной теории. Например, о чем говорит красочное и очень верное выражение Чемпиона РФ по ралли, отличного тренера-инструктора Геннадия Брославского: ««На более высокой скорости у тачки полные карманы инерции — главное ее вовремя направлять на выход из поворота.» Конечно, ралли выигрываются в скоростных поворотах, а не в шпильках, но чтобы инерцию направить во благо, надо отлично владеть всеми тонкостями динамического баланса автомобиля. Для тех, кто внимательно это прочитал, конечно, результат ответов на мой последний тест будет заметно лучше. Меня удивляет консервативная реакция многих, кто читает что я пишу или говорю про гоночные приемы, с той же реакцией как и про банальное трогание с места. Я уверяю, что любой водитель должен трогаться с постоянным газом в районе 2 000 об/мин. Меня уверяют, что этого не выдержит сцепление и нужно чтобы сначала диски проскальзывали и только потом добавлять газ! А я говорю, что мой метод вообще не изнашивает сцепление, и на моих машинах ( включая учебную езду), сцепление ходит более 200 тыс. км.
Кстати, ещё один приём г-на Уильсона называется «шортенинг зе корнер». И он экономит шины, точно так же как мой приём трогания и по тому же принципу. К чему это я? К тому, что прежде чем оспаривать мою позицию, надо хорошо подумать, изучить и прикинуть что к чему. Но, идти в ногу со временем необходимо. Об этом хорошо сказал Алексей Лукьянюк, Чемпион Европы 2020: «Я всегда старался не просто ехать быстрее конкретных соперников. Я учился ехать быстро, получал удовольствие от того, как быстро и правильно мне удавалось проехать ту или иную связку поворотов. И главной целью для меня является развитие. Останавливаться нельзя».
В тесте 22 интересных и не особо сложных вопроса. Предлагаю попробовать
Источник статьи: http://echo.msk.ru/blog/gorbi_m/2794102-echo/
VII Международная студенческая научная конференция Студенческий научный форум — 2015








РАСЧЕТ ФОРМЫ ТРАЕКТОРИИ ТРАНСПОРТНОГО СРЕДСТВА И ПРИНЦИП РУЛЕВОГО УПРАВЛЕНИЯ АККЕРМАНА
Технические возможности управления механическими системами, основанные на использовании современных информационных технологий, вызвали появление в последнее время достаточно большого количества работ по теории управления автомобилем. Задачи навигации [1,2], контроля траектории движения 6, автономного вождения и маневрирования с малыми радиусами разворота [8,9], направленные на повышение безопасности и увеличения комфорта, стимулировали появления в последние годы новых математических моделей. Многие, но не все подобные исследования, в той или иной степени базируются на принципе рулевого управления Аккермана – великом изобретении сделанном около 200 лет назад.
Историческая информация
Рудольф Аккерман (20 апреля 1764г., Штольберг, Саксония — 30 марта 1834 г., Лондон) – англо-немецкий книготорговец, изобретатель, литограф, издатель и бизнесмен (рис.1).
Рис.1. Рудольф Аккерман между 1810-1814 гг.
Он родился в г. Штольберг, в Саксонии, где посещал латинскую школу. Его желание учиться в университете не реализовалось из-за отсутствия финансовых средств, и поэтому он стал каретным мастером, как и его отец. Р. Аккерман изучил ремесло своего отца, затем работал в Дрездене, Лейпциге, Базеле, Париже и Брюсселе в качестве подмастерья и достиг высокого искусства в изготовлении рисунков и в разных, исполненных вкуса, усовершенствованиях в каретном мастерстве. Впоследствии он отправился в Лондон, где в 1794 году открыл магазин художественных произведений. Р. Аккерман ввёл в Англии литографию и усовершенствовал гравирование на дереве. В 1801 году он запатентовал метод создания водонепроницаемой бумаги и ткани и построил завод в Челси, для их изготовления. Он был одним из первых, кто применил газ для освещения помещений. Он также запатентовал геометрию рулевого управления [10].
Рулевой привод Аккермана не было на самом деле изобретением Аккермана, хотя он получил британский патент [10] на свое имя и способствовал внедрению его в ходовой части карет (рис. 2).
Рис.2. Рулевой привод Аккермана (1818 г.), в настоящее время используются в автомобилях.
Фактическим изобретателем был друг Аккермана Джордж Ланкеншпергер из Мюнхена, каретный мастер короля Баварии [11]. Очевидным преимуществом этого изобретения была возможность осуществлять безопасный поворот в ограниченном пространстве. По словам самого Аккермана: «Безопасность, долговечность, экономичность и комфорт характеризуют это полезное изобретение».
В некоторых источниках [12] принцип рулевого управления связывают с именем Шарля Жанто (1848-1906 гг.). Считается, что он изобрел рулевую трапецию в 1878 году. Ш. Жанто также известен и электромобилями, которые начал делать на своей фабрике в Ли-Може с 1893 года. На одном из электромобилей марки «Жанто» французский автогонщик граф Гастон де Шаслу-Лоба 18 декабря 1898 года, установил первый мировой рекорд скорости на безлошадном (как тогда говорили) экипаже — 63 км/ч (рис.3).
Рис 3. Электромобиль конструкции Ш.Жанто (1898 г.)
Закон рулевого управления
Традиционное описание принципа рулевого управления Аккермана можно рассмотреть, повернув передние колеса транспортного средства налево, как показано на рисунке 4 [13]
Рис. 4. Положение передних колеса автомобиля по принципу Аккермана
При движении автомобиля выполняется кинематическое условие, позволяющее вращаться колесам автомобиля без проскальзывания. Такое состояние называется условием Аккермана и выражается равенством
где – угол поворота внутреннего управляемого колеса, and – угол поворота внешнего управляемого колеса. Углы поворота внутреннего и наружного колес определяются с учетом положения мгновенного центра скоростей .
Рисунок 5 иллюстрирует поворот автомобиля влево. Таким образом, мгновенный центр скоростей находится слева, а внутренние левые колеса те, которые ближе к центру вращения.
Рис. 5. Углы положения передних колес и при рулевом управлении транспортным средством и угол Аккермана .
Расстояние между точками разворота осей управляемых колес называется колея и обозначена . Расстояние между передними и задними колесами называется колесной базой и обозначена . Колея и колесная база считаются кинематической шириной и длиной транспортного средства.
Центр масс управляемого автомобиля движется по кругу с радиусом
где угол определяется через среднее значение котангенсов внутреннего и внешнего углов управления.
Угол является эквивалентом угла поворота велосипеда, имеющего такую же колесную базу и радиус вращения , и используется в двухколесной модели автомобиля.
Рассмотренное описание вполне подходит при решении задач конструирования транспортного средства, но не подходит для решения задач навигации, управления движением, маневрирования. Для решения подобных задач движение автомобиля необходимо связать с одним управляющим параметром, в качестве которого выбирается разность углов поворота левого и правого передних колес автомобиля
где – управляемый угол левого колеса ,– управляемый угол левого колеса. При левом повороте
Из равенства площадей в левом повороте
Дальнейшее преобразование приводит к следующему уравнение связи расстояния от центра вращения до средней точки задней оси автомобиля с параметром управления.
Расстояния от центра вращения до точек находятся из равенств
Связь между углами и , обеспечивающая принцип управления Аккермана, дается следующими параметрическими уравнениями
Максимальный угол Аккермана определяется конструктивными особенностями подвески и связан с максимальным углом поворота колеса (43-45 град. реально 40-41 град.) соотношением
Расчет траектории
Закон управления устанавливает аналитическую связь межу параметром управления и движением любой фиксированной точки автомобиля. Для нахождения закона управления вводится в рассмотрение радиус кривизны траектории движения автомобиля (точки ) следующим равенством
Как известно, любая плоская кривая полностью определяется своим натуральным уравнением [14]
где – натуральный параметр (в данном случае это расстояние проходимое автомобилем), – кривизна траектории.
Для формализации задачи управления в дальнейшем целесообразно кривизну траектории движения автомобиля определять равенством
где угол – угол смежности (угол поворота касательной к траектории движения автомобиля), за положительное направление отсчета которого выбирается левый поворот транспортного средства. При повороте налево , а при повороте направо .
Тогда закон управления автомобилем записывается равенством
Здесь , при – автомобиль совершает правый поворот, а при – левый.
Т.е. любой функции управления соответствует единственная траектория движения автомобиля задаваемая уравнением (1). И наоборот, любой гладкой траектории движения автомобиля соответствует единственная функция управления, которая определяется равенством
Параметрические уравнения траектории при этом могут быть получены в следующем виде:
При движении автомобиля с постоянной скоростью параметрические уравнения траектории принимают вид:
Выводы
Для простейшей модели автомобиля, когда он моделируется прямоугольником, получен универсальный однопараметрический закон управления автомобилем, который позволяет решать различные кинематические и динамические задачи о его движении. Введение дополнительных уточняющих геометрических характеристик автомобиля, не вносит принципиальных изменений в предложенную математическую модель и может быть осуществлено при необходимости. Одним из прямых применений предложенной модели может быть существенное уточнения алгоритмов parallel parking, предложенных в работах 17, а также решение навигационных задач управления механическими транспортными средствами при помощи навигационных систем ГЛОНАСС и GPS [19] и задач управления мобильными роботами с помощью датчиков слежения. Формулы (1)-(3) могут быть востребованы при проектировании автодорог, транспортных развязок, одноуровневых и многоуровневых паркингов, автозаправок, пунктов питания и при создании тренажеров.
Библиография
Alejandro J. Weinstein, Kevin L. Moore, Pose Estimation of Ackerman Steering Vehicles for Outdoors Autonomous Navigation. Proceedings of 2010 IEEE International Conference on Industrial Automation, Valparaiso, Chile, March 2010, pp.541-546.
A. Pedro Aguia, João P. Hespanha.Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles With Parametric Modeling Uncertainty. ieee transactions on automatic control, vol. 52, no. 8, august 2007, pp. 1362-1379.
Danwei Wang, Feng Qi. Trajectory Planning for a Four-Wheel-Steering Vehicle. Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea • May 21-26, 2001
R.G. Longoria.Steering and Turning Vehicles, Spring 2012, http://www.me.utexas.edu/
Sergei V. Gusev, Igor A. Makarov. Trajectory tracking control formaneuverable nonholonomic systems. arXiv:math/0507567v1 [math.OC] 27 Jul 2005 — arXiv.org.
On Computing Robust Controllers for Mobile Robot Trajectory Calculus: LyapunovRadu Bogdan Rusu and Marius Borodi. Technical report, UTCN, 06/2005, Cluj-Napoca, Romania, (2005), http://files.rbrusu.com/publications/Rusu05RobotuxLyapunov.pdf
Nagy, B., Kelly, A., «Trajectory Generation for Car-Like Robots Using Cubic Curvature Polynomials», Field and Service Robots 2001 (FSR 01), Helsinki, Finland — June 11, 2001. http://www.frc.ri.cmu.edu/%7Ealonzo/pubs/papers/fsr2001.pdf
Jin-Hua She, Xin Xin, Yasuhiro Ohyama, Min Wu. Hiroyuki Kobayashi. Vehicle steering control based on estimation of equivalent input disturbance. The 16th IFAC world congress, Prague, July 3-8, 2005.
Ackermann, Jürgen ; Bünte, Tilman. Automatic car steering control bridges over the driver reaction time. (English). Kybernetika, vol. 33 (1997), issue 1, pp. 61-74
British Patent 4212, January 27, 1818
Ueber die Lankenspergersche u. Ackermannsche bewegliche Patent-Achsen. Dinglers Polytechnisches Journal. 1820, Band 1, Nr. XXVII. (S. 296–311) http://dingler.culture.hu-berlin.de/article/pj001/ar001027.
Толубко В.Б., Васильев Б.Г., Березан А.М. Решение проблемы маневренности увеличением степени подвижности машин с неголономными связями колесного типа // Транспортне машинобудування. Механіка та машинобудування, 2009, No 2, с.96-102
Погорелов А. И. Дифференциальная геометрия (6-е издание). М.: Наука, 1974, 176 с.
Huston, D. C. , 2010-08-05 «The Geometry of Parallel Parking» Paper presented at the annual meeting of the The Mathematical Association of America MathFest, Omni William Penn, Pittsburgh, 2012-12-03 from http://www.allacademic.com/meta/p436841_index.html
Ankit Gupta, Rohan Divekar. Autonomous Parallel Parking Methodology forAckerman Configured Vehicles. ACEEE Int. J. on Control System and Instrumentation, Vol. 02, No. 02, June 2011. рр. 34-39.
Simon R. Blackburn. The Geometry of Perfect Parking http://personal.rhul.ac.uk/uhah/058/perfect_parking.pdf
Jascha Hoffman. Perfect Parallel Parking. New York Times, 19.12.2010. http://nyti.ms/hiAhrP
Поддубный В.И., Пенюшкин А.С. Управление движением колесных мобильны машин с использованием спутниковых радионавигационных систем // Ползуновский вестник 2012. – Т1, в.1- с. 239-242.
Источник статьи: http://scienceforum.ru/2015/article/2015015215