Определение видимости дороги и конкретной видимости при наличии света фар встречного транспортного средства
Подготовительный этап
Помимо мероприятий, перечисленных выше, подготовительный этап включает установление ряда дополнительных данных. По встречному транспорту:
• тип ТС (автомобиль легковой, грузовой, трактор, мотоцикл и т.п.);
• характеристика включенного света (дальний, ближний, подфарники, прожектор и т.д.).
Если встречных ТС было несколько, то сведения по вышеизложенному перечню нужно иметь о каждом из них, а также о дистанции между ними.
По транспортному средству, совершившему наезд:
• характеристика включенного света;
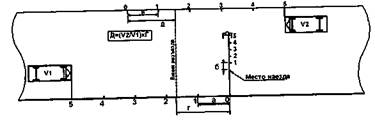
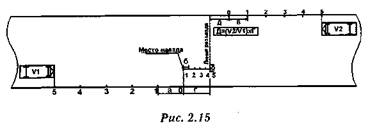
• место разъезда со встречным транспортным средством, которое может совпадать с местом наезда (см. рис. 2.6—2.9) либо располагаться как перед местом наезда (см. рис. 2.10-2.13), так и за ним (см. рис. 2.14—2.17).
На участке проведения эксперимента, предварительно огражденном постами милиции, отмечается место наезда. Линией или вешками отмечается место разъезда (место, где передние части ТС находились на одной линии).
Исходя из скоростей движения ТС, встречного (V2), совершившего наезд (V1) и объекта (V3) определяют путь, проходимый ими за одну секунду.
Разметку участков пути в одну секунду для ТС, совершившего наезд, производят от места наезда в направлении, противоположном направлению его движения. После произведенной таким об разом разметки можно определить время, которое было затрачено ТС, совершившим наезд, на преодоление пути (С1) от места разъезда до места наезда.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Рис. 2.9
Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; б — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду
Рис. 2.13
Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; б — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду; г — расстояние, которое преодолевает транспортное средство, совершившее наезд, с момента разъезда со встречным транспортным средством до момента наезда; д — расстояние, которое преодолевает встречное транспортное средство с момента разъезда с транспортным средством, совершившим наезд, до момента наезда
 |
 |
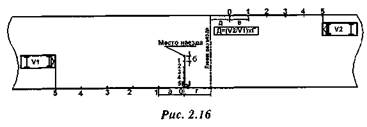 |
Очевидно, что в течение такого же времени двигалось и встречное ТС. Поэтому его положение от места разъезда будет определяться расстоянием, определяемым по формуле
 |
где С2 — расстояние от линии разъезда, на котором находилось встречное ТС в момент наезда;
С1 — расстояние от линии разъезда до места наезда; vi — скорость автомобиля, совершившего наезд;
V2 — скорость встречного автомобиля.
Таким образом, передняя часть встречного ТС в момент наезда будет находиться на расстоянии С2 за линией разъезда. От этой точки в направлении, противоположном направлению движения встречного ТС, размечают участки (так же, как и в предыдущем случае).
Примеры разметки участка проведения эксперимента по определению видимости дороги и конкретной видимости подвижного объекта при наличии встречного транспорта показаны на рис. 2.6—2.17. При этом следует отметить, что в нижеприведенных примерах рассматриваются ситуации, когда наезд был совершен без торможения. В случаях совершения наезда в процессе торможения ТС, разметка участка проведения эксперимента должна проводиться с участием специалиста-автотехника.
Ход эксперимента
Встречное ТС передней частью устанавливается на границе участка № 5 с учетом полосы движения, которую оно занимало. Транспортное средство, совершившее наезд, и объект, конкретная видимость которого определяется, устанавливаются соответственно на границы 5-х участков местом первоначального контакта, также с учетом полос движения, которые они занимали.
С этого положения фактически наблюдается состояние видимости, которое существовало за 5 с до момента наезда.
С учетом света фар ТС определяется расстояние видимости дороги с места водителя ТС, совершившего наезд. Как правило, возможность видеть объект в этот момент отсутствует. Далее ТС перемещаются в начала участков № 4, № 3 и т.д., и снова производится измерение видимости дороги и конкретной видимости объекта. Необходимость последовательного определения видимости дороги на границах участков обусловлена тем, что по мере сближения ТС величина видимости дороги, как правило, сокращается.
Определение видимости дороги и конкретной видимости объекта производится так же, как и при отсутствии встречного ТС.
Если встречных ТС было несколько, то их следует перемещать, выдерживая дистанцию, соответственно с ТС, в отношении которых проводился эксперимент.
Если будет установлено, что в каких-нибудь точках на пути сближения ТС какое-либо из них меняло режим света, то это обстоятельство необходимо учесть в ходе эксперимента. Следует также помнить о необходимости поддерживать число оборотов двигателя ТС в режимах, соответствующих их скорости движения.

Условные обозначения: а — расстояние, которое преодолевает транспортное средство, совершившее наезд, за одну секунду; 6 — расстояние, которое преодолевает пешеход за одну секунду; в — расстояние, которое преодолевает встречное транспортное средство за одну секунду; г — расстояние, которое преодолевает транспортное средство, совершившее наезд, с момента наезда до разъезда со встречным транспортным средством; д — расстояние, которое преодолевает встречное транспортное средство с момента наезда до разъезда с транспортным средством, совершившим наезд
Источник статьи: http://infopedia.su/9x8ba6.html
Определение видимости встречного автомобиля
Сеть «Техэксперт» предоставляет комплексный набор услуг, включающий в себя все, что может потребоваться специалисту, работа которого связана с анализом и применением зарубежных и международных стандартов.
Уникальная система для специалистов, в которой аккумулируется и постоянно обновляется информация по реформе технического регулирования в РФ: проекты и утвержденные техрегламенты, перечень ГОСТов, указатель норм, правил, стандартов России.
Уникальная система, в которой аккумулируется информация о поддержке организаций и граждан в условиях кризиса, возникшего на фоне пандемии.
© АО «Кодекс», 2021
Исключительные авторские и смежные права принадлежат АО «Кодекс». Политика конфиденциальности персональных данных
Версия сайта: 2.2.27
Каждому техническому специалисту: строителю, проектировщику, энергетику, специалисту в области охраны труда.
Дома, в офисе, в поездке: ваша надежная правовая поддержка, всегда и везде.
Каждому техническому специалисту: строителю, проектировщику, энергетику, специалисту в области охраны труда.
Дома, в офисе, в поездке: ваша надежная правовая поддержка, всегда и везде.
Возможность входа в эту версию портала приостановлена.
Скоро выходит новая версия. Она получит обновленный современный интерфейс, возможность удобной работы со смартфона, переработанный поиск и множество других улучшений.
Источник статьи: http://docs-api.cntd.ru/document/1200095524
Обеспечение видимости. Расчетные схемы видимости
Видимостью дороги называют минимальное необходимое расстояние, на котором водитель должен видеть впереди себя дорогу, с тем, чтобы заметить препятствия, он смог своевременно его избежать. На прямом горизонтальном участке водитель в хорошую солнечную погоду просматривает встречный транспорт на расстояние более 1000 м. Препятствиями для видимости дороги в плане на кривых малого радиуса являются расположенные с внутренней стороны кривой лес, строения или крутой откос выемки.
На переломах продольного профиля видимость может быть не обеспечена на выпуклых переломах при малой величине радиусов выпуклых вертикальных кривых, на вогнутых переломах при освещении дороги фарами ночью при малых радиусах вогнутых кривых. Расстояние видимости должно быть достаточным, чтобы водитель, увидев препятствие, смог остановить машину, не доезжая до него или объехать его.
В соответствии с этим расстояние видимости определяют, исходя из двух принципиально разных предпосылок:
· схемы торможения, предусматривающей остановку перед препятствием или встречным автомобилем;
· схемы объезда, исходящей из объезда автомобилем препятствия или обгона попутного автомобиля с выездом на смежную полосу встречного движения.
Расстояние видимости по 1–ой схеме обеспечивает безопасность движения, по 2–ой – как безопасность, так и бесперебойность движения.
Рассмотрим вывод расчетных зависимостей (рис. 3.14).
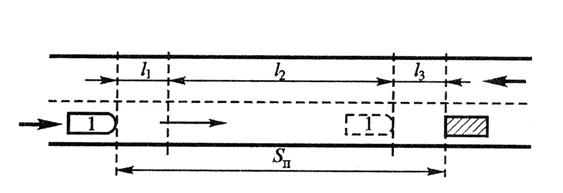
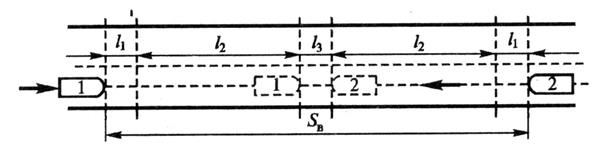
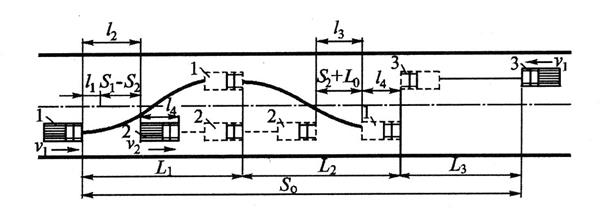
Рис. 3.14. Схемы видимости:
а – схема определения расстояния видимости поверхности дороги Sп;
б – схема определения расстояния видимости встречного автомобиля Sв;
в – схема определения расчетного расстояния видимости при обгоне Sо
1. Схема – «одиночное торможение»: автомобиль встречает препятствие на той же полосе движения и требуется полная его остановка на безопасном расстоянии от препятствия (рис. 3.14, а).
Этот случай является расчетным для дорог всех категорий и, особенно, для дорог с четко выделенными полосами движения, когда выезд на соседнюю полосу невозможен.
Расчетное расстояние по этой схеме складывается из трех расстояний:
 ,
,
где l1 – путь, проходимый автомобилем за время реакции водителя;
ST – путь торможения;
Время реакции водителя t зависит от условий движения и индивидуальных психологических особенностей водителя. В городских условиях или на горных дорогах водитель ведет автомобиль с повышенным вниманием, в то время, как в однообразной местности его внимание рассеивается. В ряде стран предлагают время реакции принимать дифференцированно. Например, при обгоне t = 0,75 с, поскольку водитель располагает временем для подготовки маневра. При неожиданно возникшем препятствии t = 1,5 с. В Швейцарии на дорогах с разделительной полосой, где невозможно появление пешеходов, принимают t = 2 с, на обычных дорогах t = 1 с. В Англии принимают t = 0,75 с в городских условиях и t = 2,5 сек на загородных дорогах. В РФ время реакции водителя принимают в среднем равным 1 с.
С учетом вышесказанного, пренебрегая величиной коэффициента качения f, получим:
или выражая V в км/ч
2. Схема – «двойное торможение»: Автомобиль и встречный автомобиль, едущий по той же полосе движения, должны, увидев друг друга, становиться, не доезжая друг до друга (рис. 3.14, б). Эта схема применима для двухполосных и однополосных дорог (II – V категорий).
Расчетное расстояние видимости по этой схеме складывается из расстояний, которые автомобили проходят за время реакции водителей, тормозных путей автомобилей и расстояния запаса

Для случая V1 = V2, i1 = i2 причем, один автомобиль движется вверх по уклону, а другой вниз
 .
.
3. Схема – «обгон»: Быстроходный автомобиль обгоняет тихоходный автомобиль с выездом на соседнюю полосу движения до встречи со встречным автомобилем (рис. 3.14, в). Эта схема приемлема для дорог без разделительной полосы.
В начальный момент времени расстояние между обгоняющим и обгоняемым автомобилем равно разности их тормозных путей плюс путь, проходящий обгоняющим автомобилем за время реакции водителя

Путь обгона рассматривается как состоящий из трех путей:
Участок L1 – обгоняющий автомобиль, выехав на смежную полосу движения, поравнялся с обгоняемым автомобилем. Это расстояние зависит от разности скоростей идущих автомобилей
Участок L2 – обгоняющий автомобиль, возвращается на свою полосу движения, причем между обгоняющим и обгоняемым автомобилем расстояние должно равняться тормозному пути второго автомобиля с некоторым запасом
 .
.
 .
.
Участок L3 – путь, проходящий за это время встречным автомобилем
Расстояния видимости нормируется ГОСТом [3] в зависимости от скорости движения одиночного легкового автомобиля.
Минимальные расстояния видимости нормируются в зависимости от расчетной скорости (табл. 3.2).
Нормативные значения расстояний видимости по ГОСТу [3]
| V, км/ч | |
| Sп, м | |
| Sв, м | — |
Расстояние видимости по схеме «обгон» нормативными документами не нормируется. Расчеты показывают, что оно должно быть более 700 м. Дорога считается хорошо запроектированной, если обгоны возможны на участках, составляющих более 2/3 ее длины.
Необходимость в обеспечении боковой видимости возникает в городских условиях, при пересечениях с железными и автомобильными дорогами в одном уровне, в местах, где возможен переход дороги людьми и животными.
Необходимое расстояние боковой видимости (рис. 3.15)
где S – тормозной путь
Vп, Va – соответственно скорость пешехода и автомобиля.
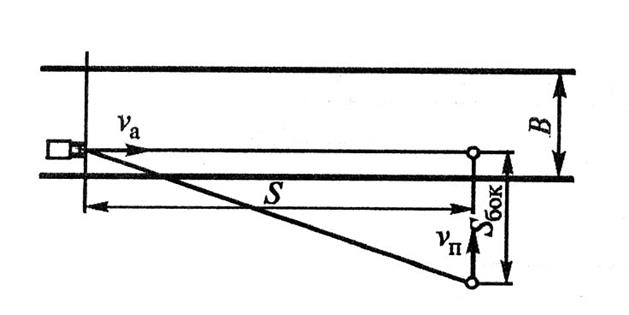
Рис. 3.15. Схема к определению расстояния боковой видимости
Для бегущего человека Vn может быть принята 10 км/час.
По СНиП [2] для дорог I – III категорий Lб = 25 м, для дорог I – V категорий Lб = 15 м.
3.7. Обеспечение видимости на кривых в плане
Видимость на кривой в плане обеспечена, если автомобиль находящийся в точке А, видит автомобиль, находящийся в точке В на расстоянии, равном расчетному расстоянию видимости для данной категории дороги (рис. 3.16).
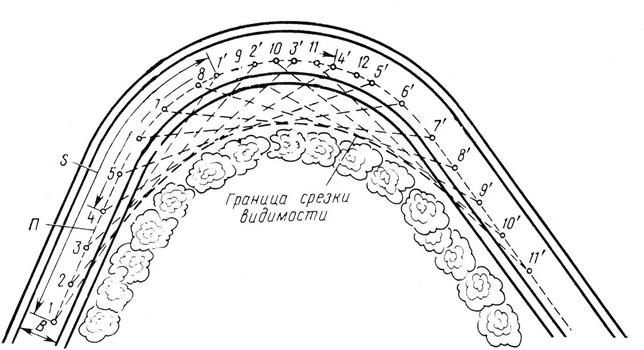
Рис. 3.16. Обеспечение видимости на кривой в плане
Луч зрения, равный расстоянию видимости по одной из приведенных выше схем, является границей площади, внутри которой не должно быть препятствий, мешающих видимости. Обеспечение видимости на кривых в плане проверяют для автомобилей, движущихся по крайней внутренней полосе движения. Принимают, что глаз водителя расположен в 1,5 м от внутренней кромки проезжей части на высоте 1,2 м. Это соответствует положению водителя легкового автомобиля.
Разработан графический метод определения границы срезки препятствий – в зоне видимости (рис. 3.17).
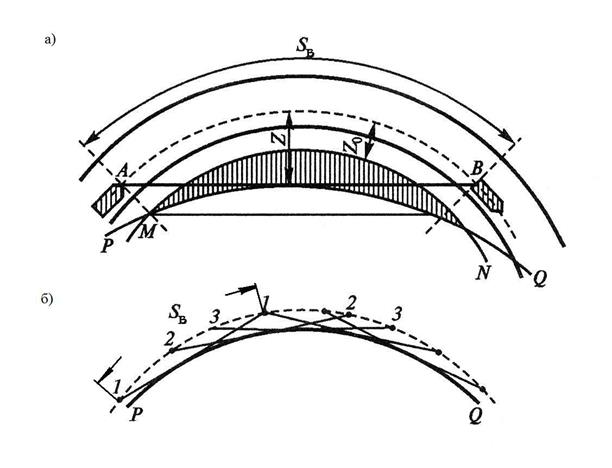
Рис. 3.17. Обеспечение видимости на кривых в плане:
а – общая схема видимости; б – построение кривой видимости
На плане закругления по линии траектории движения автомобиля откладывают расстояния видимости S, которые соединяются прямыми линиями. Огибающая этих линий определяет границу видимости.
Графическое определение границы видимости целесообразно, когда из зоны видимости необходимо удалить ценные здания или произвести другие дорогостоящие работы.
В остальных случаях можно определить максимальную стрелу видимости в центре круговой кривой аналитическим методом и принятии величину расчистки в пределах всей кривой одинаковой.
Стрела видимости в центре круговой кривой приближенно определяется из следующих соображений:
1-й случай: длина кривой меньше расстояния видимости К
Источник статьи: http://infopedia.su/12x1ebc.html