- Бесконтактные лазерные и оптические датчики скорости и пути
- Оптический датчик, лидар — характеристики, принцип работы
- Что такое оптический датчик
- Как устроен лидар автомобиля
- Принцип работы оптического датчика
- Где применяется лидар
- Преимущества и недостатки оптического датчика
- Стоимость оптического датчика для автомобиля
Бесконтактные лазерные и оптические датчики скорости и пути
Бесконтактный принцип измерения скорости достаточно прост. «Простейший» прибор – глаз. Каждый, глянув в окно вагона или автомобиля, может оценить скорость движения по пробегающему мимо пейзажу. «Обработка» сигнала при этом происходит в мозгу – оценка расстояния до какого-либо объекта, его угловая скорость, плюс жизненный опыт. То же, с гораздо более высокой точностью, можно измерить на приборном уровне.
Рассмотрим сначала лазерный датчик, как наиболее простой. Итак, есть движущийся объект, осветитель этого объекта (иначе ничего не увидим) и регистрирующая отраженный сигнал оптическая система. Это может быть просто линза и фотодетектор (ФД).
Объект неоднороден по яркости и шероховатости, поэтому при движении, ФД будет регистрировать сигнал, частота которого пропорциональна скорости. Характерное значение этой частоты определяется линейным размером области регистрации ФД и временем пересечения этой области элементом объекта. В принципе, задача решена, но очень неточно. Это так называемый низкочастотный сигнал. Для увеличения точности измерений необходимо сузить спектр частот, генерируемый движущимся объектом. И для этого есть радикальное средство – пространственный фильтр. Это термин из области оптических растровых датчиков.
В случае лазерных датчиков – это просто создание интерференционной картины, т.е. периодической модуляции освещенности объекта в пределах лазерного пучка (это область детектирования). Это возможно благодаря свойству когерентности лазерного излучения – все фотоны в пучке сфазированы. Достаточно разделить исходный пучок на два пучка, и свести их под углом к другу. Это и есть в данном случае пространственный фильтр. Теперь любой перепад профиля или яркости объекта, пересекающий эту периодическую структуру, даст отраженный сигнал, интенсивность которого промодулирована с частотой «период освещенности» – «скорость его пересечения».
При этом, чем больше число созданных периодов – тем уже спектр сигнала – единичный перепад профиля или яркости объекта будет генерировать не один импульс, а множество (цуг) импульсов, число которых определяется количеством периодов интерференционной картины. На практике – например, при диаметре пучка на объекте 5 мм и периоде интерференции 0,05 мм – получаем 100 штрихов интенсивности, соответственно, цугов сигнала, т.е. спектр сузился примерно в 100 раз по сравнению с вышеописанным низкочастотным сигналом (который теперь малоинформативный, более того, мешает и так и называется – паразитный). Отметим, что достаточно 20 – 30 штрихов для достижения точности измерений лучше 0,1%.
В случае оптических датчиков – объект освещается однородным источником (просто лампочка или светодиод) – а периодическая структура (растр) находится внутри датчика. При этом он получается гораздо более защищенным (это как в спорте – санки и бобслей) – но возникает множество проблем, основная из которых – зависимость частотного отклика ( коэффициент пропорциональности между частотой регистрируемого сигнала и скоростью объекта в Гц/(м/с)) от расстояния до объекта. Забегая вперед, отметим, что сейчас эта проблема решена кардинально.
Подробный обзор по лазерным и оптическим датчикам скорости (способы создания пространственных фильтров, методы обработки сигналов…) можно найти в монографии [1]. На двух сотнях страниц описана вся теория. Только не сказано, как же на этой основе сделать работающий в реальных суровых условиях (температурный диапазон, различные поверхности и изменения расстояний до них в процессе измерений) датчик.
Производителей реальных бесконтактных датчиков в мире не так много – порядка десятка фирм выпускают лазерные датчики, еще меньше – оптические. В данной статье рассмотрим подробнее датчики обоих типов, производимые российской фирмой ООО «ПТП«Сенсорика-М».
Поскольку она недавно вышла на этот рынок, при создании датчиков использовались самые последние достижения, как в области «железа», так и в математических алгоритмах обработки сигнала плюс оригинальные технические решения, созданные совместно со специалистами Института общей физики РАН. Например, оригинальный оптический моноблок для лазерного датчика, основанный на принципе деления пучка по волновому фронту обеспечивает стабильную интерференционную картину, нечувствительную к изменениям температуры, с нулевой разностью хода пучков, что обеспечивает максимальный контраст штрихов в большом диапазоне расстояний до объекта. При этом отсутствуют какие-либо юстировки оптического блока. Оптическая схема приемной растровой системы оптического датчика полностью устраняет зависимость измеренной скорости от расстояния до объекта при сохранении высокой светосилы оптики. На данное техническое решение получены патенты России и Германии [2] .
В приемной аналоговой электронике и в части аппаратной обработки сигнала также используются самые современные микросхемы и микроконтроллеры с сигнальными процессорами, что позволяет измерять скорость с высокой частотой и реализовывать различные выходные сигналы – аналоговые, частотные, цифровые. Выпускается широкая линейка датчиков обоих типов, с номинальными расстояниями до объекта от 15 до 130 см и диапазоном измеряемых скоростей от 0,01 до 100 м/с для самых различных применений в промышленности и на транспорте (подробнее можно посмотреть на сайте компании). В 2014 г. лазерный датчик внесен в Госреестр СИ (средств измерений), оптический датчик будет внесен в Госреестр в 2015г.
Отметим, что оба типа датчиков измеряют пройденный путь (длину, которая обычно и требуется на практике) по измеренной скорости (интеграл скорости по времени). При этом техническая точность измерений (возможности датчика в смысле повторяемости измерений) уже достигла своего практического предела и превышает обычные потребности практики. Например, в технических данных приводится точность измерений длины Далее приведем несколько примеров применения датчиков с оценкой точности и повторяемости измерений .
Высота установки датчика – примерно 50 см (допустимо от 35 до 65 см). Частота измерений: 54,2 Гц, пределы измерения скорости: 0,02 – 110 Км/ч. Проезд по замкнутой траектории длиной около 1 Км (в условиях города, день, солнечно, температура -7 ˚С). Движение с переменной скоростью (0-50 Км/ч), с несколькими остановками. Результаты измеренного пути по трем заездам: 1055,740 м, 1056,244 и 1055,33 м, т.е. повторяемость измерений составила В статье приводится краткий обзор принципов измерения скорости и пройденного пути (длины) бесконтактными лазерными и оптическими датчиками и демонстрируются технические параметры этих приборов на примере продукции российского предприятия ООО «ПТП«Сенсорика-М».

Рис. 1. Оптический датчик ИСД‑3 и лазерный ИСД‑5, закрепленные на автомобиле во время тестовых заездов.
Номинальная высота оптического датчика ИСД-3 – 50 см, лазерного датчика ИСД-5 -130 см, но установлен он на высоте 100 см. На прямом участке асфальтовой дороги проведено 4 заезда (по 2 в каждую сторону) примерно одинаковой длины и сравнивалась относительная разность показаний датчиков. Результаты представлены в Таблице.
Табл.1. Результаты параллельного измерения одного и того же пути обоими датчиками.
| Номер заезда | |||
| 1 | 1345,68 | 1345,01 | — 0,05 |
| 2 | 1394,01 | 1395,08 | 0,07 |
| 3 | 1382,51 | 1382,73 | 0,016 |
| 4 | 1345,14 | 1343,06 | -0,15 |
| Средняя относительная разница | 0,03 ± 0,1 % | ||
Таким образом, реальное качество измерений обоих датчиков в дорожных применениях одинаково и относительная повторяемость измерений составляет сотые доли процента. При этом отметим, что вообще для дорожных применений предпочтительно использовать оптический датчик, поскольку он значительно более устойчив к внешним неблагоприятным условиям, как это упоминалось выше (температура, снег, дождь…), в частности, он малочувствителен к загрязнениям входной оптики – это как фотоаппарат – объектив может быть совсем грязным, но фотографировать, в принципе, не мешает. В то же время попадание, например, капли воды на выходную оптику лазерного датчика может сильно исказить интерференционную картину на объекте.
Для общего представления качества измерений на рис.2 представлен график скорости разгона – торможения локомотива с товарным составом ( Щербинский ЖД полигон, датчик скорости и дистанции – ИСД-3, номинальное расстояние 80 см, устанавливался на днище локомотива и «смотрел» прямо на шпалы).
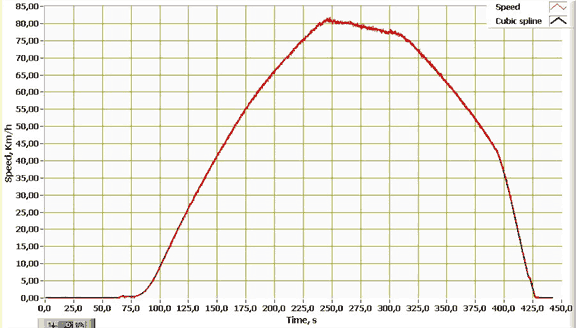
Рис. 2. График скорости разгона и торможения локомотива с товарным составом.
График позволяет оценить мгновенную точность измерений скорости, поскольку движение ЖД состава – пример максимальной плавности скорости. Также в качестве иллюстрации приводятся очень интересные и познавательные графики – тормозные испытания автомобильных шин на льду (ледовый каток «Арена» в Мытищах, использовался оптический датчик). На рис. 3а представлены результаты пяти заездов разгон – торможение на зимних не шипованных шинах, на рис 3б – то же самое на шипованных.
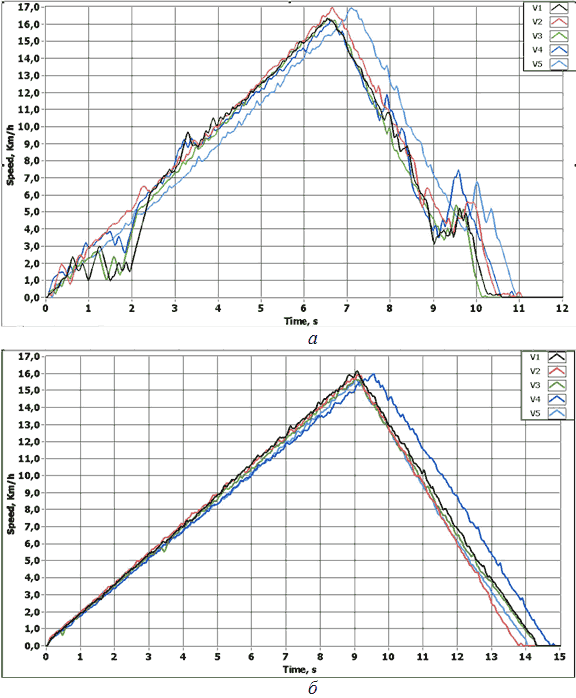
Рис. 3. Точность, с которой оптический датчик ИСД-3 измеряет скорость разгона и торможения автомобиля на льду: а – автомобиль на зимних не шипованных шинах; б – автомобиль на шипованных шинах.
Обратите внимание, что пички скорости – не шумы измерений, а совершенно реальны, именно так движется автомобиль на льду.
Данные датчики, конечно — же используются и в промышленности. Здесь приведем только один яркий демонстрационный пример: измерение длины стекла. Объект: вращающийся диск из полированного стекла с максимально чистой поверхностью. Измеритель – лазерный, с номинальным рабочим расстоянием 130 см (в реальности стекло горячее, поэтому требуются измерения с больших дистанций). На диске нанесена метка – начало и конец измерений окружности, которая считывалась датчиком. Длина измеряемой окружности — 2,173 м. Проведено две серии измерений по 7 и 11 измерений. Средняя измеренная длина составила 2,1732 и 2,1733 м при стандартном отклонении 0,034 и 0,036%.
Из последних разработок ООО «ПТП«Сенсорика-М» можно также упомянуть двумерные лазерные датчики, позволяющие, в частности, измерять поступательную скорость вращающейся на рольгангах трубы – актуальная задача на участках нанесения изоляции на трубопрокатных заводах (серийный вариант будет доступен во втором квартале 2015 г.). И уж совсем экзотика – измерение скорости подводных аппаратов относительно среды (экспериментальный образец демонстрировался на форуме «Морская индустрия России» [3]). И много другого. Из-за ограниченности объема статьи здесь можно только посоветовать посетить сайт производителя.
Таким образом, «наши» бесконтактные датчики пути – скорости ни в чем не уступают мировым аналогам, а зачастую и превосходят их. При этом стоят на данный момент в несколько раз дешевле.
С. Ф. Растопов, к. ф.-м. н., технический специалист,
ООО «ПТП«Сенсорика-М»., г. Москва,
тел.: (499) 753-3990, (499) 487-0363
Ссылки:
1. Y. Aizu T. Asakura, Spatial Filtering Velocimetry, Fundamentals and Applications, Springer Series in Optical Sciences (Book 116), 2005, 212р.
2. Патент РФ № 2482499 и Патент DE 11 2011 102 253 B4.
3. IV Международный форум «Морская индустрия России», выставочный комплекс «Гостиный двор», Москва, 20-22 мая 2014 г.
Источник статьи: http://www.sensorika.com/ru/lib/datchiki-skorosti-i-puti/
Оптический датчик, лидар — характеристики, принцип работы
Рассмотрим принцип работы оптического датчика, его устройство и основное предназначение. В конце статьи видео-обзор принципа работы лидара (оптического датчика).

Содержание статьи:
- Что такое лидар
- Устройство
- Принцип работы
- Применение элемента
- Плюсы и минусы
- Стоимость
- Видео
Оптический датчик или другими словами лидар (Light Detection and Ranging) – специальный фотоэлектрический датчик для измерения дистанции и обнаружения объектов. Основой работы такого датчика являются электромагнитные волны (инфракрасные), благодаря которым он определяет расстояние до объекта.
Что такое оптический датчик

Представить современный автомобиль без пассивной или активной системы безопасности практически невозможно, да и многие страны попросту могут отказаться от подобных машин. Почти каждая система безопасности использует определенные датчики для снятия и сбора определенной информации. Основой для таких систем стал оптический датчик или по-другому — лидар. В зависимости от требований к датчику и его предназначения, внешний вид и устройство внутри могут отличаться, но принцип работы остается без изменений.
Основной задачей считается замер расстояния (дистанции к объекту), хотя в некоторых случаях он так же может замерять и скорость объекта находящегося впереди. В некоторых случаях по функционалу лидар выступает как альтернатива автомобильному радару, за счет чего в характеристиках машины может быть отмечен как лазерный радар для разных активных систем безопасности. По радиусу действия, расстояние достигает 250 метров, а угол разрешения достигает 180 градусов. Таким образом, использовать лидар можно как в пассивных, так и активных системах безопасности, а малые габариты позволяют установить в самых нестандартных местах автомобиля.
Как устроен лидар автомобиля

Устройство лидара (оптического датчика) своеобразно, и по сути напоминает электронную схему, собранную в одном элементе. Среди основных деталей лидара специалисты выделяют:
- модулятор;
- передатчик;
- приемник;
- специальный оптический элемент;
- усилитель;
- микропроцессор для обработки данных;
- аналого-цифровой преобразователь сигналов.
Каждый из перечисленных элементов выполняет весьма важную роль в механизме лидара. Рассмотрим более подробно, за что отвечает каждая деталь. Основную роль и все начало работы берется с диода, который передает инфракрасное излучение (луч). Интенсивность инфракрасного луча, в случае необходимости изменяется за счет модулятора. В свою очередь в зависимости от типа модуляции, выделяют два типа лидаров: импульсного и непрерывного действия. Все же специалисты говорят, что лидар непрерывного типа отживает свое, тем самым уступая более прогрессивному импульсному оптическому датчику. Чтоб повысить эффективность оптического датчика на основе импульсного метода работы, инженеры одновременно начали использовать несколько импульсов для передачи, тем самым сделав технологию многоимпульсной.

Не менее важным считается оптический элемент, через который проходят импульсы. Миновав оптический элемент, световой импульс поступает на фотодиод, благодаря которому он преобразуется в электрический сигнал для распознавания другими элементами. Следующий в этой цепочке лидара стоит АЦП или аналого-цифровой преобразователь другими словами. Именно благодаря ему, электрический сигнал с фотодиода преобразуется в цифровой сигнал. Последний этап в работе оптического датчика – обработка полученного цифрового сигнала микропроцессором, именно он выдает блоку управления информацию, которую считал лидар.
Как уже говорили, внешний вид оптического датчика может отличаться, как по производителям, так и по моделям одной марки автомобиля. Но основная задача и принцип работы механизма отличаться не будет.
Принцип работы оптического датчика

Разобравшись, какие основные элементы входят и выполняют работы оптического датчика, неплохо рассмотреть его принцип работы и тем самым понять, где основные плюсы и минусы, а так же что может навредить работе механизма.
Несмотря на внешние отличия и структуру строения, принцип работы лидара одинаковый на любом автомобиле и системе безопасности. В момент срабатывания, инфракрасный свет направляется на цель, отраженный свет от цели частично рассеивается (теряется), а частично возвращается к излучателю, тем самым попадая в фотодиод.
Как правило, ток на фотодиоде пропорциональный инфракрасному свету, который воздействует от отраженного объекта. Фотодиод, после распознавания инфракрасного пучка импульсов производит электрический сигнал, передавая его в аналого-цифровой преобразователь. Суть такого элемента, точней целого интегрального набора деталей, создать такой сигнал, который мог бы распознать микропроцессор.
По внешнему виду это небольшая микросхема, так же как и микропроцессор, но без АЦП управляющие блоки не смогут работать. Следующие два шага – передача цифрового сигнала в микропроцессор и в дальнейшем отправка его в основной электронный блок управления. Именно в ЭБУ анализируется полученная информация, распознаются образы объектов впереди автомобиля, а так же другие непредсказуемые ситуации, в которых используется оптический датчик.
Где применяется лидар

Использование оптических датчиков в автомобилях может быть самым разным и вовсе не предсказуемым. Самые разные системы активной и пассивной безопасности используют данные элементы для получения той или иной информации. Например, система мониторинг расстояния к объектам впереди или сзади автомобиля. Так же данный элемент могут использовать для снятия скорости или момента вращения деталей.
Если говорить более понятным языком, то это может быть система распознавания и определения пешеходов, адаптивный круиз-контроль, система мониторинга объектов и прочие. Благодаря вертикальному и горизонтальному расширению оптического датчика, элемент может считывать больше информации, а перемещение передатчика инфракрасного излучателя и поворотного зеркала, в разы увеличивает возможности механизма. Можно твердо говорить, что такой механизм вполне отрабатывает поставленную логику и в нужный момент передать информацию в блок управления.
Преимущества и недостатки оптического датчика

Как и в любом механизме, оптический датчик автомобиля имеет свои преимущества и недостатки. Основной плюс это скорость срабатывание, точность обработки полученной информации, а так же огромный спектр возможностей для использования в разных системах безопасности.
Помимо положительных моментов, есть и отрицательные (недостатки) от которых никак нельзя избавиться, даже в наши дни. Как показывает практика использования, оптический датчик очень чувствительный к погодным условиям и рельефному покрытию. Эффективность работы лидара уменьшается с ухудшением погодных условий, в частности на дождь, снег, туман и прочие погодные явления.
Механизм попросту не может получить отображение инфракрасного луча, а так же искажается за счет погодных явлений. Загрязнение датчика так же негативно сказывается на работе системы. Механизм попросту выдает неправдивую информацию или не срабатывает на заявленную производителем дальность.
Стоимость оптического датчика для автомобиля

Говорить об определенной стоимости оптического датчика нельзя, хотя принцип работы одинаковый для многих. Вся основа цены заключается в системе (механизме) где применяется лидар или же его строении. Самый обычный датчик без особых излишних функций обойдется от $10, если же говорить о системах безопасности, в частности адаптивный круиз-контроль или мониторинг объектов впереди автомобиля обойдется от $100.
В современных электромобилях оптические датчики расставлены по всему периметру. Таким образом, производители добавляют и дорабатывают системы безопасности и комфорта. Как пример, лидар для адаптивного круиз-контроля компании Nissan обойдется от $160, для современной системы ночного видения от Mercedes-Benz или Toyota по цене $235 за один такой оптический элемент.
На первый взгляд оптический датчик неприметный и кажется, что от него мало толку, но разобравшись в деталях и его возможностях понимаешь – это сердце большинства систем безопасности и комфорта, которые мониторят ситуацию вокруг автомобиля в режиме реального времени.
Видео-обзор принцип работы лидара:
Источник статьи: http://fastmb.ru/auto_shem/3535-opticheskiy-datchik-lidar-harakteristiki-princip-raboty.html