Отклонение автомобиля при торможении
Рис. 22. Динамические характеристики торможения колеса
Ясно, что чем больше Rx, т. е. чем сильнее тормозится колесо, тем хуже его устойчивость, а следовательно, хуже устойчивость самого автомобиля.
Мощность современных тормозов такова, что даже на самой хорошей дороге водитель может заблокировать колеса автомобиля.
При этом возможны следующие случаи: потеря траекторной устойчивости в случае блокирования передних колес. Эти колеса теряют возможность передавать на автомобиль боковые реакции и, следовательно, он не может поворачивать и движется только прямо, несмотря на поворот рулевого колеса водителем. При блокировании колес передней оси может возникнуть се занос со скоростью v3 (рис. 23,6).
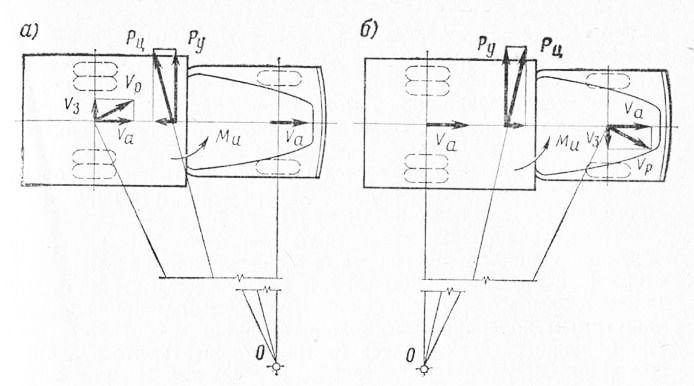
Рис. 23. Схема заноса мостов автомобиля:
а — занос заднего моста; б — занос переднего моста
Максимальная величина коэффициента сцепления фтах является функцией многих переменных. Определяющее влияние на величину фШах оказывают тип и состояние дорожного покрытия. Трудно себе представить способ регулирования этого фактора. Правда, определенным шагом в этом направлении можно считать применение шипов противоскольжения, сезонных шин или шин из специальной гидрофильной резины. Однако все эти решения дороги и эффективны только в постоянных погодных условиях. Кроме того, шипы изнашивают покрытие дороги, уничтожают разметку, образуют колеи.
В конце 60-х годов у отечественных и зарубежных изобретателей стал популярным другой способ влияния на сцепление колеса с дорогой — автоматическое выбрасывание под колеса специальных ковриков, обладающих высокими фрикционными свойствами. Главный и далеко не единственный порок этого способа заключается в том, что скольжение колеса, которое, как будет показано ниже, можно регулировать, подменяется здесь скольжением по дороге коврика, что регулированию не поддается.
В качестве курьеза следует упомянуть и о предложениях выстреливать в полотно дороги мощный штырь, тросом или цепью связанный с автомобилем.
Нормальная реакция дороги Rz зависит от массы автомобиля, положения его центра масс, конструкции подвески, характера дорожных неровностей и т. п. Если не рассматривать динамику взаимодействия колеса с неровностями, приводящего к ощутимым колебаниям Rz, около величины, соответствующей нормальной нагрузке колеса Pz, можно считать, что реакция Rz целиком определяется соответствующей долей массы автомобиля.
Нормальная нагрузка колеса Pz является величиной переменной. Кроме массы автомобиля и положения центра масс, яа нее влияет и режим движения. Так, при разгоне задние колеса дополнительно нагружаются, а передние — разгружаются, при торможении — наоборот. На повороте к тому же происходит бортовое перераспределение массы. Свои коррективы вносит и уклон дороги. Ясно, что величины такого перераспределения массы, а значит, и величины нормальных нагрузок колес зависят от ускорения автомобиля. Единственный практически достижимый способ регулирования нормальных нагрузок —регулирование ускорения автомобиля.
Таким образом, единственно целесообразным способом обеспечения неравенства выражающего собой требование одновременного обеспечения достаточной тормозной эффективности и хорошей устойчивости движения, является регулирование тормозного момента с помощью изменения давления в тормозном приводе.
Рассмотрим возможные пути осуществления такого регулирования. Для упрощения вопроса ограничимся прямолинейным движением автомобиля. Надо сказать, что фактически прямолинейная траектория представляет собой последовательную совокупность сопряженных криволинейных участков, кроме того, на колесо постоянно действуют боковые силы, вызванные неровностями дорожного покрытия, воздушными потоками, биением колес и т. п. При торможении за счет неравномерности действия тормозных механизмов на автомобиль начинает действовать поворачивающий момент, который в пределах запаса по сцеплению компенсируется действием боковых реакций дороги. Таким образом, даже при внешне прямолинейном движении автомобиля торможение может привести к потере устойчивости.
Первый и самый простой путь регулирования заключается в изменении водителем усилия на тормозной педали исходя из субъективной оценки сцепления колес с дорогой. Опытные водители при торможении на скользких дорогах иногда добиваются успеха, применяя импульсное торможение, т. е. быстро блокируя и разблокируя колеса (лучше всего тормозить на грани блокирования, но практически это невозможно). Способ этот ненадежен, так как слишком многое зависит от квалификации и внимания водителя, быстроты изменения внешних условий и т. д.
Следует отметить, что некоторые возможности облегчить задачу водителя могут быть реализованы при конструировании транспортного средства.
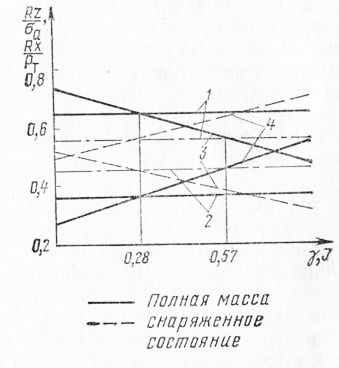
Рис. 24. Расчетное распределение тормозных сил и нормальных нагрузок по осям грузового автомобиля
При этом возможен случай, когда задние колеса вообще не заблокируются. При фжтах=у—0,28 колеса обоих мостов заблокируются одновременно. При флтах= =у>-0,28 первыми будут блокироваться задние колеса. Поскольку последний случай представляется более опасным, можно, изменяя соотношение тормозных сил, уменьшить соответствующую зону.
Автостроители широко применяют этот путь повышения устойчивости и эффективности торможения. Задние колеса грузовых автомобилей обычно несут большую нормальную нагрузку и поэтому их тормозные механизмы делают мощнее. Например, применяя тормозные камеры с большей эффективной площадью диафрагмы. Наоборот, у легковых автомобилей статические осевые массы примерно одинаковы, а это значит, что даже при самом малоэффективном торможении передняя нормальная нагрузка гарантированно становится больше задней. Передние тормоза легковых автомобилей, как правило, мощнее задних (обычно это достигается выбором схемы тормозного механизма).
Недостатки этого способа очевидны: он эффективен только при том коэффициенте сцепления, той полезной нагрузке и тех координатах центра масс, на которые рассчитывали конструкторы.
На рис. 24 пунктиром показаны отношения для того же автомобиля в снаряженном состоянии. Видно, что в этом случае во всем диапазоне коэффициента сцепления задние колеса будут блокироваться первыми.
Таким образом, можно констатировать, что выбор нужной величины тормозных сил путем регулирования давления в приводе водителем малоэффективен из-за изменения нормальных осевых нагрузок. Очевидно, что этот недостаток можно преодолеть, меняя в соответствии с изменением условий торможения (в том числе и нормальных осевых нагрузок) распределение тормозных сил.
Этот способ оказался исключительно перспективным. Он позволил реализовать второй путь повышения устойчивости автомобиля при торможении — автоматическое регулирование тормозных сил автомобиля. Средствами такого регулирования являются специальные приборы тормозного привода — Регуляторы тормозных сил и сложные противоблокировочные системы.
Источник статьи: http://stroy-technics.ru/article/ustoichivost-avtomobilya-pri-tormozhenii
Устойчивость автомобиля при торможении
Рассмотрим устойчивость автомобиля при торможении для двух случаев:
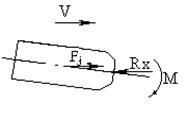
а) заблокированы передние колеса, задние разблокированы.
 |
В этом случае реакции от дороги будут воспринимать только задние колеса, поскольку сцепные возможности передних колес полностью реализованы.
Fj — инерционная сила направлена по направлению движения и приложенная в центре масс автомобиля. Реакция Rx на задних колесах автомобиля направлена противоположно Fj. Эти две силы создают поворачивающий момент, направленный противоположно заносу. Автомобиль теряет управляемость, однако устойчив на дороге.
 |
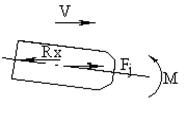
б) заблокированы задние колеса, передние разблокированы.
В этом случае реакцию от дороги будут воспринимать только передние колеса, поскольку сцепные возможности задних реализованы в полной мере.
Сила инерционная Fj в этом случае также приложена в центре масс автомобиля и направлена по направлению движения. Реакция Rx, воспринимаемая передними колесами, которые не являются заблокированными, противоположна ей. Эти две силы и создают поворачивающий момент, направленный в сторону заноса.
Cледовательно, при блокировке задних колес, автомобиль неустойчив на дороге, однако управляем.
Из двух рассмотренных случаев более опасен второй, поскольку занос приводит к ДТП. Задача сводится к тому, чтобы не допустить блокировки вначале задних колес. Если это требование не будет выполняться, то это вызовет занос автомобиля или в кювет, или на полосу движения встречного транспорта.
Для обеспечения устойчивости движения автомобиля при торможении применяется следующее:
-если в автомобиле устанавливаются только барабанные тормозные механизмы, то на переднем мосту устанавливаются две первичные тормозные колодки, а на заднем — одна первичная, а вторая — вторичная;
-на переднем мосту устанавливаются дисковые тормозные механизмы, а на заднем — барабанные тормозные механизмы;
-если на автомобиле устанавливаются только дисковые тормозные механизмы, то на передние колеса устанавливаются более мощные тормозные механизмы;
-применяются регуляторы тормозных сил.
Все регуляторы тормозных сил разделяются на два вида:-регуляторы без обратной связи;-регуляторы с обратной связью или противоблокировочные (антиблокировочные) системы.
Регуляторы без обратной связи
Регуляторы без обратной связи устанавливаются только на задние колеса автомобиля. Они, ограничивая давление в задних тормозных механизмах, не допускают вначале блокировки задних колес, хотя блокировку колес не устраняют. Этим обеспечивается устойчивость автомобиля при торможении.
Регуляторы с обратной связью (противоблокировочные системы или сокращенно ПБС или АБС) не допускают блокировки ни передних, ни задних колес автомобиля при торможении. При торможении такого автомобиля колеса будут находится на грани блокировки. В этом случае коэффициент сцепления достигает максимального значения, а значит и замедление будет максимальным.
Регуляторы без обратной связи характеризуются рабочей характеристикой регулятора. Под рабочей характеристикой регулятора понимается график зависимости давления в задних цилиндрах Р2 тормозных механизмов от давления в передних Р1.
Разделяются регуляторы без обратной связи на
* лучевые, у которых  (см. рис.8.4а),
(см. рис.8.4а),
где  — коэффициент передачи регулятора; Р1 ,Р2 — давление в рабочих цилиндрах соответственно передних и задних тормозных механизмов;
— коэффициент передачи регулятора; Р1 ,Р2 — давление в рабочих цилиндрах соответственно передних и задних тормозных механизмов;
* с постоянной точкой срабатывания (см. рис.8.4б);
* с постоянной точкой срабатывания и пропорциональным клапаном(см. рис.8.4в);
с переменной точкой срабатывания и меняющимся коэффициентом передачи регулятора (см. рис. 8.4 с)
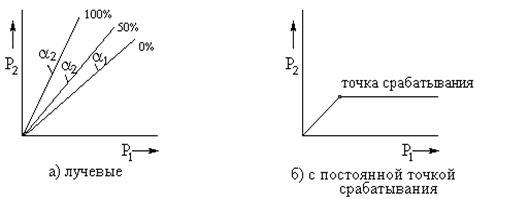
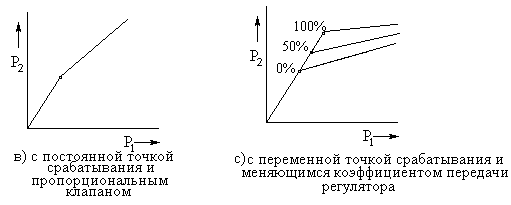
Рис.8.4 Рабочие характеристики регуляторов без обратной связи
Регуляторы с обратной связью
Принципиальная схема регулятора с обратной связью приведена на рис.8.5.
Регулятор включает датчики, которые устанавливаются на всех колесах автомобиля. Сигнал от датчика поступает на электронный блок. Электронный блок управляет в зависимости от сигнала, поступающего от датчиков, модулятором. Модулятор, к которому подводится давление от тормозного крана, изменяет давление в тормозном цилиндре в зависимости от сигнала, поступающего от электронного блока.
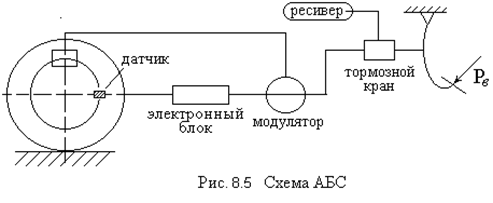
Характеризуется такой регулятор графиками, представленными на рис.8.6. На рис. 8.6.а приведена зависимость давления в тормозном цилиндре от времени торможения, а на рис. 8.6.б — скольжения от удельной тормозной силы.
При воздействии водителя на тормозную педаль с усилием Рв давление в силовом цилиндре возрастает до Р1, что будет соответствовать максимальной удельной тормозной силе, численно равной коэффициенту сцепления (точка 1, рис.8.6. б). В этом случае срабатывает модулятор. Поскольку система обладает инерционностью, то давление будет возрастать до Р2. Скольжение увеличивается и достигает точки 2 (см. рис.8.6 б). Затем преодолев инерционность системы давление уменьшится до Р3, которое меньше давления Р1 (давления срабатывания регулятора).
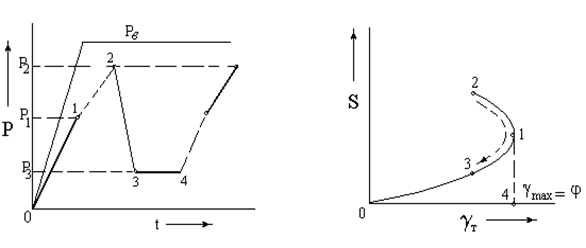
Рис.8.6 Характеристики АБС
При изменении давления от Р2 до Р3 удельная тормозная сила будет изменяться по кривой 2-1-3 (см. рис. 8.6 б). В точке 3 у трехфазного регулятора произойдет задержка давления до точки 4, а затем процесс повторится.
| | | следующая лекция ==> | |
| Замедление при торможении автомобиля | | | Путь торможения, тормозной и остановочный пути |
Дата добавления: 2017-06-02 ; просмотров: 443 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/9-22233.html
Отклонение автомобиля при торможении
Наибольшее значение для безопасности автомобиля имеет рабочая тормозная система. Ее применяют для плавного снижения скорости с замедлением 2,5-3 м/с 2 (служебное торможение) и для резкого уменьшения скорости с максимально возможным в данных дорожных условиях замедлением до 8-9 м/с 2 (экстренное или аварийное торможение). В целом при одном назначении рабочей и запасной тормозных систем, требования эффективности торможения запасной тормозной системой, предназначенной для снижения скорости АТС при выходе из строя рабочей тормозной системы, менее жесткие.
Из всех операций по управлению автомобилем экстренное торможение считается одним из наиболее трудных. Многие действия водитель повторяет по нескольку десятков и сотен раз за смену и, выработав определенные навыки, достигает в них необходимого автоматизма. Аварийное торможение требуется относительно редко, и натренированность водителя в его применении минимальна. В отличие от остальных операций по управлению, выполняемых водителем в спокойном состоянии и медленном темпе, экстренное торможение связано с внезапным возникновением препятствия. Ощущение опасности создает нервное напряжение, вызывая гнетущее чувство беспокойства, страха и резко усиливая психофизиологическую нагрузку водителя. Возникает состояние стресса, при котором водитель может или вообще не выполнить необходимых действий, или выполнить их в замедленном темпе, или, наконец, совершить действия, прямо противоположные требуемым. К тому же, как показывает практика, неисправности в обычных условиях не проявляются, но при резком торможении могут вызвать отказ ТС.
Для обеспечения безопасности автомобиля тормозная система должна удовлетворять следующим требованиям:
- Время срабатывания системы должно быть минимальным, а замедление — максимальным во всех условиях эксплуатации.
- Все колеса должны затормаживаться системой одновременно и с одинаковой интенсивностью.
- Тормозные силы на колесах должны нарастать плавно, в системе не должно быть заеданий и заклиниваний.
- Эффективность действия системы должна быть постоянной в течение всего срока службы, а вероятность отказов минимальной.
- Работа системы не должна вызывать потери устойчивости.
- Усилия, необходимые для перемещения рабочих органов управления (педали, рычаги) системы, не должны превышать физических возможностей водителя.
- Система должна иметь сигнализацию для информирования принципов движения о начале, интенсивности и окончании торможения.
Для физического представления требований к рабочей тормозной системе рассмотрим процесс торможения, рис. 2.7, поэтапно во времени.
-
- Время реакции водителя tp. Водитель, заметив препятствие и оценив дорожную обстановку, принимает решение о торможении. Он переносит ногу с педали подачи топлива на тормозную педаль. Принято считать, что время реакции водителя находится в пределах от 0,3 до 2,5 с.
При неожиданном возникновении опасности это время обычно больше. Скорость автомобиля, практически, не меняется. Время, необходимое для этих действий зависит от условий обзорности автомобиля, но в большей степени от квалификации водителя, его возраста, степени утомления и других факторов, поэтому при оценке эффективности торможения не нормируется. Предельное значение времени реакции водителя может быть одним из критериев надежности водителя.
-
- Время срабатывания тормозной системы tср. Этот период принято делить на два временных интервала:
время запаздывания тормозной системы tс. После нажатия на педаль тормозная сила на колесах, вызывающая замедление, возникает не сразу. Необходимо время для выбора зазоров в соединениях тормозного привода. Это время от начала торможения до появления замедления колеблется в среднем от 0,1 до 0,4 с (гидравлический привод) от 0,6 до 0,8 с (пневматический привод). У автопоездов с пневматическим приводом тормозных механизмов оно может достигать 2-3 с. В течение времени tс автомобиль продолжает двигаться равномерно с начальной скоростью υ0;
время нарастания замедления tн В этом периоде тормозные силы и замедление (отрицательное ускорение j) монотонно нарастают до определенного значения.
Увеличение тормозных сил, приложенных к колесам, вызывает рост касательных реакции Rх1 и R х2 . До начала блокировки колес касательные реакции считают пропорциональными времени Rx =f(t), см. рис. 2.7, а (линии 1 и 2).
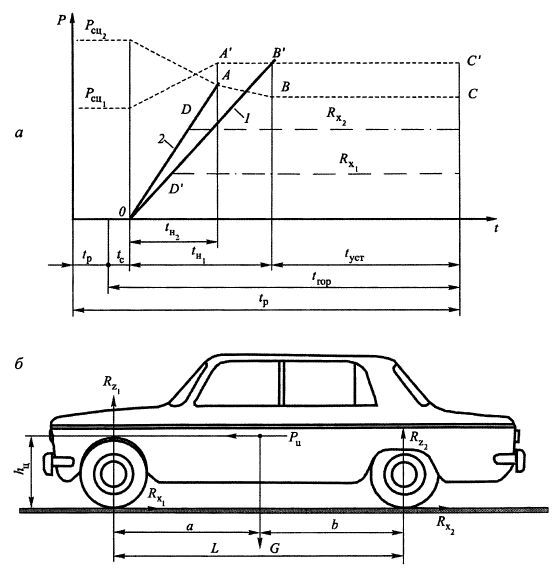
Рис. 2.7. Торможение автомобиля:
а — зависимость сил сцепления от времени; б — схема сил, действующих на автомобиль
Скорость изменения тормозных сил на передней и задней осях обозначают, соответственно, К1 и К2. Для тормозных систем с гидроприводом скорость равна 15-30 км/с, с пневмоприводом — 25-100 км/с.
Блокирование колес (если максимальные значения тормозных сил ограничены только сцеплением шин с дорогой) указывает на то, что рост тормозных сил и замедления прекращен. Закон изменения касательной реакции на колесах переднего моста в процессе торможения характеризуется линией ОВ’С’, а на колесах заднего — линией ОАВС.
При коэффициенте сцепления φх = 0,7 продолжительность времени до начала блокирования колес заднего моста может быть 0,5 с. Колеса переднего моста блокируются еще через 0,3с. Скорость автомобиля снижается до υ 2 = 0,8 υ 0.
При снижении скорости автомобиля торможением рабочей тормозной системой тяговая сила РТ может сравняться по величине с силой сцепления Рсц ведущих колес, вследствие чего возможно пробуксовывание колес как обоих на оси, так и одностороннее, что может привести к заносу и выходу из коридора движения.
Максимально допустимая скорость при прямолинейном движении автомобиля до буксования ведущих колес может быть определена из выражения:
 (2.11)
(2.11)
Ма — масса автомобиля, кг;
g — ускорение свободного падения, м/с 2 ;
Wв — фактор обтекаемости, Н с 2 /м 2 ;
а — расстояние от центра тяжести автомобиля до переднего моста, м;
φх — коэффициент продольного сцепления;
f — коэффициент сопротивления качению;
αд — угол продольного уклона дороги;
δвр — коэффициент учета вращающихся масс;
L — база автомобиля, м;
hцт — высота центра тяжести, м;
Движение автомобиля со скоростью, близкой к υбук, является лишь одной из предпосылок заноса. Теоретически автомобиль при торможении может двигаться с этой скоростью неограниченно долго без потери курсовой устойчивости. Однако в реальных условиях под действием поперечной составляющей массы, бокового ветра, неровностей дорожного покрытия, а также различных по величине тормозных сил, прикладываемых к колесам правой и левой стороны, возможно при торможении линейное отклонение автомобиля от его направления движения уже в начале нарастания замедления.
При малых скоростях влияние этих возмущений невелико, но в случае большой скорости они могут привести к нарушению устойчивости при торможении и выходу автомобиля из коридора движения.
Время запаздывания и время нарастания замедления, а также линейное отклонение автомобиля при торможении зависят от конструкции и технического состояния тормозной системы автомобиля. Поэтому время срабатывания рабочей и запасной тормозными системами нормируется для категорий (вида) автомобилей (нормативы времени срабатывания тормозных систем для эксплуатирующихся АТС рассматриваются в главе 6). Нахождение в пределах нормативного коридора движения 3м при торможении рабочей тормозной системой также является обязательным требованием безопасности для всех ТС.
3. Время действия установившегося замедления tуст Увеличение тормозного момента, приложенного к колесу, вызывает рост тормозных сил, пока касательные реакции не достигнут максимального значения, обусловленного сцеплением шин с дорогой. После прекращения роста тормозных сил движение автомобиля происходит с установившимся замедлением до конца торможения. В этом периоде сила инерции РИ = Mgφх (для простоты расчетов примем коэффициент учета вращающихся масс δвр = 1), а замедление Jуст = gφх — и автомобиль движется равнозамедленно, а его скорость падает до нуля. При υ 3 = 0 продолжительность третьего периода tуст = υ 2 / jyст. Величина установившегося замедления зависит от массы автомобиля и определяет продолжительность времени торможения, поэтому нормируется для категорий (вида) автомобилей.
При принятых допущениях тормозные силы Rх1 и R х2 могут беспрепятственно достигать предельных значений по условиям сцепления:
 (2.12)
(2.12)
Где: Р сц1 и Pсц2 — силы сцепления шины с дорогой, соответственно, переднего и заднего мостов; R z 1 и Rz 2 — вертикальные реакции дороги, действующие, соответственно, на передний и задний мосты.
Однако, практически, у автомобиля, оборудованного тормозной системой с гидроприводом, предельная величина тормозных сил ограничена физическими возможностями водителя. Усилие, развиваемое им при экстренном нажатии на тормозную педаль, составляет в среднем 500-600 Н и не превышает 1000-1200 Н. У автомобиля, имеющего тормозную систему с пневмоприводом, рост тормозных сил лимитируется мощностью компрессора и давлением воздуха в магистрали. (Рост касательных реакций прекращается в точках D и D’, после чего они остаются примерно постоянными и равными R х2 и Rx 1 ). Однако, при постоянных характеристиках тормозной системы в изменяющихся дорожных условиях и неравномерном распределении массы автомобиля по осям возможны неуправляемые блокировки колес одного моста.
Если у автомобиля блокируются только колеса заднего моста и мощность тормозных механизмов недостаточна для доведения передних колес до юза, то замедление на третьем периоде можно определять по формуле:
 (2.13)
(2.13)
Рассмотрим пример: при торможении грузового автомобиля категории N2 (масса — 8000 кг, начальная скорость υ 0 = 70 км/ч, φх = 0,7) после прекращения роста тормозных сил по условиям сцепления (колеса заблокированы) время установившегося замедления tуст составило 2,2 — 2,4 с. Перемещение автомобиля за время срабатывания тормозной системы (время запаздывания и нарастания замедления) равно 20,4 м, а за время установившегося замедления — 21,2 м, т. е. тормозной путь составит около 42 м. При ограничении роста тормозных сил конструктивными возможностями тормозной системы (RX1 max = 15 кН, RX2 max = 25 кН) продолжительность времени торможения возрастает до 4,6 с, максимальное замедление автомобиля падает с 7 м/с 2 до 5 м/с 2 , а тормозной путь возрастает до 52 м.
Как правило, разработчики тормозных систем, стремятся обеспечить управляемость и предотвратить раннюю блокировку передних колес при торможении. В конструкции грузовых автомобилей большой грузоподъемности и автобусов большой вместимости (М3 и N3) ограничивают величину тормозных моментов на колесах переднего моста. Это приводит к тому, что максимальные значения касательных реакций от действия тормозных сил при движении по дорогам с сухим покрытием обычно меньше силы сцепления. Поэтому, показатели тормозной динамичности и, соответственно, нормативы тормозной эффективности таких автомобилей ниже, чем у автомобилей, имеющих меньшую массу.
Приведенные формулы, связывая конструктивные особенности автомобиля (массу, положение центра тяжести, базу), дорожные условия, скорость нарастания тормозных сил и т. п., характеризуют упрощенную модель процесса торможения. Для практических расчетов эффективности торможения рекомендует вводить поправочный коэффициент Кэ. Примерные значения Кэ для сухого асфальто — или цементобетонного покрытия (φх = 0,7) даны в табл. 2.3.
Таблица 2.3. Поправочный коэффициент Кэ к расчетам эффективности торможения
Источник статьи: http://atxp.ucoz.org/index/ehffektivnost_tormozhenija_i_ustojchivost_pri_tormozhenii/0-60