Физика автомобиля для игр.
Автор: Marco Monster
Введение
Эта статья рассказывает о поведении автомобилей в играх, а именно о физике автомобиля.
Одним из ключевых пунктов в упрощении физики транспортного средства является раздельная обработка продольной и боковой силы. Продольная сила работает в направлении корпуса автомобиля (или же в противоположном направлении). Это сила тяги, тормозящая сила, сила трения и сила сопротивления перемещению (= сопротивление воздуха). Вместе эти силы управляют ускорением или замедлением автомобиля, следовательно, и скоростью автомобиля. Боковые силы позволяют автомобилю поворачиваться. Эти силы вызваны поперечным трением на колесах. Мы также рассмотрим угловой момент скорости автомобиля и момент вращения, вызванные боковыми силами.
Примечание и соглашения
Векторы выделены полужирным текстом, мы будем использовать 2d векторы. Так что примечание a = —b означало бы следующее:
На протяжении все этой статьи я буду предполагать, что задние колеса являются ведущими (для четырех ведущих колес нужно применять необходимую адаптацию)
Все физические величины я буду измерять в единицах СИ (метры, килограммы, Ньютоны и т.д.).
Физика движения по прямой
Сначала рассмотрим автомобиль, двигающийся по прямой линии. Какие силы задействованы здесь? Прежде всего, это сила тяги, то есть сила, которая передается двигателем через задние колеса. Двигатель вращает колеса вперед (на самом деле он передает момент вращения на колеса), колеса «толкают назад» поверхность дороги, в результате поверхность дороги выталкивает колеса в противоположном направлении, то есть вперед. Сейчас мы просто положим, что сила тяги эквивалентна по величине переменной Engineforce, которая управляется непосредственно пользователем.
Ftraction = u * Engineforce,
где u — единичный вектор в направлении движения автомобиля.
Если бы это была единственная сила, то автомобиль просто бы ускорился до бесконечной скорости. Ясно, что в реальной жизни дело обстоит совсем не так. Введем силы сопротивления. Первая и обычно наиболее важная — сила воздушного сопротивления, другими словами аэродинамическое сопротивление. Эта сила важна, поскольку она пропорциональна квадрату скорости. Когда мы двигаемся быстро (а какая игра не вовлекает в высокие скорости?) эта сила становится наиболее важной силой сопротивления.
Fdrag = — Cdrag * v * |v|
где Cdrag константа, v — вектор скорости и |v| — модуль вектора v, являющийся длиной вектора v.
Длина вектора скорости обычно известна как скорость. Обратите внимание на различие типа данных: скорость — скаляр, скорость — вектор. Используйте приблизительно следующий код:
Так же, еще есть сопротивление вращения. Это вызвано трением между резиной и дорожной поверхностью, так как колеса прокручиваются, трением на осях и т.д. Мы обозначим это силой, которая пропорциональна скорости, с использованием другой константы.
При низких скоростях трение (Frr) является основной силой сопротивления, при высоких скоростях Fdrag превышает по значению Frr. Приблизительно при 100 км/час (60 миль в час, 30 м/с) они равны ([Zuvich]). Это означает, что Crr должен быть равен приблизительно 30-ти Cdrag.
Общая продольная сила — это векторная сумма этих трех сил.
Обратите внимание, что если вы двигаетесь по прямой линии, то силы аэродинамического сопротивления и трения будут направлены противоположно силе тяги (Ftraction). То есть вы вычитаете силу аэродинамического сопротивления из силы сцепления. И когда автомобиль движется с постоянной скоростью, то силы находятся в равновесии, и Flong равен нулю.
Ускорение (a) автомобиля (в м/с 2 ) определено равнодействующей силой автомобиля (в Ньютонах) и массой автомобиля М (в килограммах) по второму закону Ньютона:
Скорость автомобиля (в метрах в секунду) определяется, как интеграл ускорения через какое-то время (dt). Это звучит слишком сложным, но следующее уравнение поможет нам. Воспользуемся методом Эйлера для численного интегрирования.
v = v + dt * a,
где dt — промежуток времени между предыдущим и текущим вызовами просчета физики.
Позиция автомобиля свою очередь определяется, как интеграл скорости по dt.
Используя эти три силы, мы уже довольно точно можем моделировать ускорение автомобиля. Вместе они также определяют максимальную скорость автомобиля для данной мощности двигателя. То есть, нет необходимости устанавливать максимальную скорость где-нибудь в коде, она автоматически вычисляется из уравнений. Дело в том, что уравнения формируют своего рода цикл отрицательной обратной связи. Если сила тяги (Ftraction) превышает все другие силы, то автомобиль ускоряется. Увеличивающаяся скорость, также заставляет увеличиваться силы сопротивления. Равнодействующая сила уменьшается, а следовательно уменьшается и ускорение. В некоторой точке силы сопротивления и сила тяги компенсируют друг друга, и автомобиль достигает своей максимальной скорости для данной мощности двигателя.

На этом графике Ось X обозначает скорость автомобиля в метрах в секунду и значения силы, которая отмечена по Оси Y. Значение силы тяги (темно синий) установлено произвольно, оно не зависит от скорости автомобиля. Трение (пурпурная линия) — линейная функция скорости, и сопротивление (желтая кривая) — квадратичная функция скорости. При низких скоростях трение превышает аэродинамическое сопротивление. При 30 м/с эти две функции пересекаются. При более высоких скоростях аэродинамическое сопротивление является наибольшей силой сопротивления. Сумма из двух сил сопротивления показана светло-синей кривой. При 37 м/с эта кривая пересекает горизонтальную линию силы тяги. Это — максимальная скорость для данной мощности автомобиля (37 м/с = 133 км/час = 83 мили в час).
Источник статьи: http://www.gamedev.ru/code/articles/?id=4233&page=6
Поворот колес автомобиля физика
7. ФИЗИКА ДВИЖЕНИЯ
Есть еще один важный аспект, заслуживающий внимания. Современные автомобили имеют такой высокий уровень комфорта, что обратная связь в них минимальна и сводится к нулю. Водитель словно погружается в виртуальное пространство: ветровое стекло превращается в экран компьютера, а руль становится джойстиком. Такие ощущения провоцирует сам автомобиль, уверенно, словно по рельсам, летящий по дороге, что кажется возможным пройти поворот любой крутизны на любой скорости. На самом деле это очень обманчивое ощущение. Рано или поздно в силу вступают законы физики, выталкивающие автомобиль в кювет или на полосу встречного движения.
Рассмотрим силы, действующие на автомобиль в такой ситуации.
Любое движущееся тело имеет свою массу. Для замедления или изменения направления движения этой массы к ней требуется приложить силу. Чем большего изменения в характере движения мы хотим от массы, тем большую силу требуется приложить.
Силы, действующие на движущийся автомобиль, проходят через три оси (рис. 2). Горизонтальная поперечная ось, та, по которой происходит перераспределение веса в повороте. В левом повороте автомобиль кренится направо, в правом – налево. Любой водитель и пассажир всегда ощущают эту силу во время поворота. Вес груженого автомобиля составляет как минимум одну тонну. Даже маленькая малолитражка с четырьмя пассажирами на борту будет весить именно столько. Автомобили среднего и представительского класса весят около двух тонн, а внедорожники легко тянут на три, три с половиной тонны. Этот вес покоится на четырех пружинах подвески. Понятно, что он будет неустойчив, обязательно «захочет» накрениться. Почему одна сторона кузова поднимается – движется вверх, в то время как противоположная опускается – движется вниз, понять крайне просто: кузов расположен на пружинах, которые могут сжиматься и разжиматься. Крен автомобиля в повороте – это естественное и понятное движение кузова автомобиля относительно колес. В результате перемещения веса в сторону внешних колес в повороте, на них начинает давить большая сила (рис. 3). Означает ли это, что их сцепление с покрытием дороги увеличивается? Конечно да! Но вес, давящий на внутренние колеса, уменьшился, так как часть его перешла на наружную сторону – произошло динамическое перемещение веса. Значит, сцепление внутреннего колеса с покрытием дороги уменьшилось. Крен автомобиля зависит от расположения его центра тяжести, ширины шин, жесткости амортизаторов и конструкции подвесок. Например, болиды «Формулы-1» практически не кренятся даже на огромных скоростях в поворотах. Они сконструированы специально для движения с огромной скоростью, и, хотя динамическое перемещение веса у них происходит точно так же, как и у обычного автомобиля, крен почти не виден. Это объясняется сверхкороткоходной подвеской, очень широкими колесами, жесткими пружинами и работой специальных приспособлений, которые называются стабилизаторами поперечной устойчивости (рис. 4). Из названия понятно, что они как раз и придуманы, чтобы не давать кузову крениться. Подобные приспособления имеются и на обычных городских автомобилях и внедорожниках, только они, конечно, не могут быть такими жесткими как на гоночных и спортивных машинах. Обычные машины должны быть комфортабельными, а это означает, что их пружины и стабилизаторы подбираются так, чтобы обеспечить мягкость хода на неровностях. Да и шины у них не такие широкие, и центр тяжести из-за большого дорожного просвета расположен значительно выше. Хотя уже появились и серийные машины, которые почти не кренятся в поворотах. Их амортизаторы оснащены специальной гидравлической системой, управляемой электроникой, которая дает команды поднимать внешнюю сторону кузова в поворотах. Идея сделать одну сторону автомобиля жестче, если поворачивать приходится все время в одну сторону, не нова. Именно так и поступают американские гоночные инженеры, готовящие свои болиды для гонок на овалах, например в Индианаполисе.
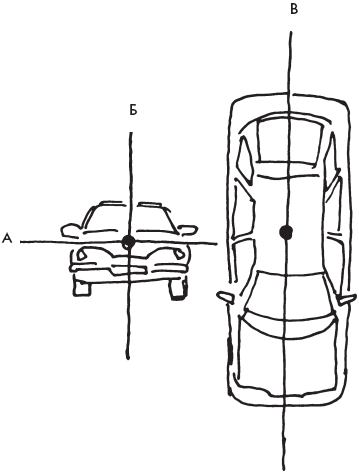
Рис. 2. ОСИ ВРАЩЕНИЯ АВТОМОБИЛЯ:
Крен автомобиля в повороте – это естественное и понятное движение кузова автомобиля относительно колес.
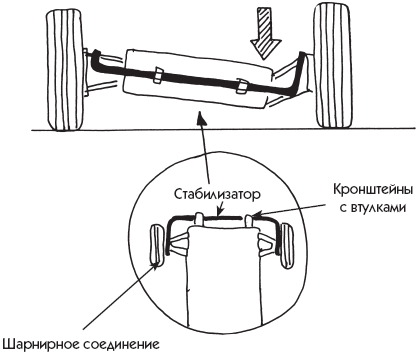
Рис. 4. СХЕМАТИЧНЫЕ ИЗОБРАЖЕНИЯ РАБОТЫ СТАБИЛИЗАТОРА
Стабилизаторы поперечной устойчивости не дают кузову автомобиля сильно крениться в повороте. П-образный металлический пруток работает на скручивание, сопротивляясь крену кузова в поворотах. На современных автомобилях имеются передний и задний стабилизаторы.
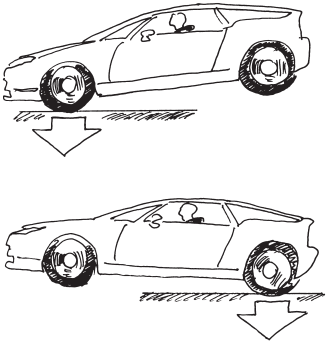
Теперь рассмотрим продольную ось (рис. 5). При резком старте капот автомобиля приподнимается. Это видит водитель со своего места, а на самом деле приподнимается вся передняя часть машины, передние пружины разгружаются, вес перемещается назад – задние пружины сжимаются. Вес автомобиля, естественно, остается неизменным, и мы говорим только о динамическом, кратковременном перемещении веса. Насколько сильно перемещается вес? Если вес автомобиля принять за 100 %, а ускорение за 0,5 G, что соответствует ускорению 18 км/ч, то задняя часть автомобиля станет на 15 % тяжелее. Немного? Да, но эффект от этого большой! На заднеприводных автомобилях он выражается в лучшем старте машины за счет большего давления на ведущие колеса, и, следовательно, улучшения их сцепления с дорогой. Значит ли это, что, если водитель прибавляет газ во второй половине поворота, за счет улучшающегося сцепления задних колес машина будет устойчивей? Разумеется, да (рис. 6). Но не надо забывать, что переднеприводник за счет разгрузки передних колес будет хуже стартовать, да и в повороте любое прибавление газа уменьшает сцепление его ведущих колес. При торможении (возьмем пример с замедлением в 9,81 м/с2) перемещение веса приобретает поистине драматический характер. Например, на переднеприводном автомобиле, где мотор с коробкой передач находится спереди (а это дополнительный вес на переднюю ось), при торможении задние колеса разгружаются настолько сильно, что малейший поворот руля вызывает их занос (рис. 7), так как в этот момент на задние шины давит всего 12 % от всего веса автомобиля. Если просто резко отпустить педаль газа, то вес также переместится вперед, разгружая задние колеса.
При резком старте приподнимается вся передняя часть машины, передние пружины разгружаются, вес перемещается назад – задние пружины сжимаются.
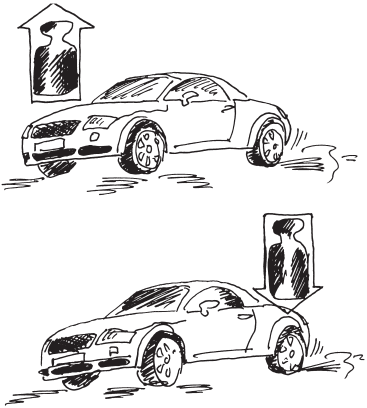
Рис. 6. ДИНАМИЧЕСКОЕ ПЕРЕРАСПРЕДЕЛЕНИЕ ВЕСА ПРИ РАЗГОНЕ АВТОМОБИЛЯ
Во время ускорения вес перемещается назад и загружает заднюю часть автомобиля. Сцепление задних шин с покрытием дороги увеличивается. Автогонщики, зная об этом, умело используют загрузку задних колес для стабилизации автомобиля, чтобы нейтрализовать избыточную или недостаточную поворачиваемость.

Рис. 7. ДИНАМИЧЕСКОЕ ПЕРЕМЕЩЕНИЕ ВЕСА ПРИ ТОРМОЖЕНИИ
Вес, действующий на переднюю часть автомобиля увеличивается, соответственно задок автомобиля разгружается. Гонщики используют этот эффект облегчения задней оси, чтобы искусственно вызвать занос автомобиля, помогающий пройти поворот на большой скорости.
Линия, проведенная через крышу до самой дороги через центр тяжести автомобиля, называется вертикальной осью. В момент заноса машина начинает вращаться вокруг этой вертикальной оси. Для большинства водителей такая ситуация часто оказывается полной неожиданностью (рис. 8).
Рис. 8. ВРАЩЕНИЕ АВТОМОБИЛЯ
В момент заноса машина начинает вращаться вокруг этой вертикальной оси. Для большинства водителей такая ситуация часто оказывается полной неожиданностью.
Однажды мой приятель захотел прокатить меня с ветерком на своей новой машине, а заодно и удивить мастерством вождения на загородном шоссе. Он без промедления ринулся обгонять длинный хвост машин, да слишком поздно включил пониженную передачу, перешел с четвертой на третью. Это я подметил сразу. Но расстояние между машинами справа не позволило ему втиснуть машину, а мы неотвратимо приближались к крутому правому повороту впереди. Приятель решил, что успеет обогнать следующие две машины и юркнуть в то спасительное свободное место, что было перед ними. Почти успел, но его возвращение в правый ряд после обгона практически совпало с началом поворота. Он резко бросил газ, и, как только начал поворачивать руль, наш автомобиль поплыл задней осью в сторону. «Газу, газу», – закричал я. Мой приятель подчинился и поймал вышедшую из-под контроля машину. Если бы он начал тормозить в этот критический момент на входе в поворот, как поступают, увы, в любой аварийной ситуации большинство водителей (а среди них многие считают себя асами), шанс на выход из этой ситуации был бы сведен к нулю.
Какие силы действовали в этот момент на машину, и как удалось изменить их расстановку. Шины задней оси потеряли сцепление из-за резкого перемещения веса. Замедление было вызвано сбросом газа, вследствие чего произошло перемещение веса вперед. Поворот руля вызвал перемещение веса на внешние колеса. Это означает, что давление на определенные колеса изменилось, следовательно, изменилось и их сцепление с дорогой. В нашем случае перемещение веса шло одновременно в двух направлениях: продольном и поперечном. Идеальная ситуация, в результате которой автомобиль едва ли не всегда норовит выйти из-под контроля. Водитель хотел изменить направление, во что бы то ни стало заставить машину повернуть, в то время когда она опиралась практически всем своим весом на одно-единственное внешнее к повороту переднее колесо. А для замедления или изменения направления движения массы автомобиля к ней требуется приложить силу. Но площади контакта с дорогой одного-единственного колеса для того, чтобы эта сила подействовала, явно недостаточно. Что же произошло, когда водитель прибавил газ? Вес перераспределился назад, и задние колеса обрели сцепление (внешние больше, внутренние меньше), что и остановило начинающийся занос задней оси. Прибавляя газ, водитель чисто интуитивно немного повернул руль обратно – «распустил» машину, добавил нагрузки на внутренние к повороту колеса.
Гонщики в аналогичных ситуациях поступают точно так же. Они точно знают, как автомобиль будет реагировать на перемещение веса, а обычный водитель о перемещении веса часто не задумывается. А любое изменение направления или характера движения, будь то ускорение или замедление, поворот налево или направо, обязательно сопровождается перемещением веса, которое изменяет сцепление шин с дорогой. Конечно, автолюбителю не обязательно уметь филигранно направлять свой автомобиль в повороты с головокружительной скоростью, как делает автогонщик, умело использующий перемещение веса в свою пользу. Но знать элементарные законы физики, сопровождающие автомобиль в движении, он обязан.
Если предположить, что предстоит ездить по абсолютно гладкой поверхности, например как сукно бильярдного стола или поверхность ледяного катка, то о вертикальном перемещении веса автомобиля говорить не придется. На практике дорога – это волнистый асфальт, бугры, крутые подъемы и спуски, ямы и другие неровности.
Представим ситуацию: машина въехала с большой скоростью на бугор. Кузов устремляется вверх, подвеска разгружается, и в этот момент водитель решил изменить направление движения. Это ошибка. Именно в это мгновение контакт шин автомобиля с дорогой очень слабый. А буквально через секунду, когда кузов автомобиля опустится, шины вновь обретут сцепление, причем еще большее, чем до подскока. В этот момент машина чутко откликнется на поворот руля (рис. 9).
Машина въехала с большой скоростью на бугор: кузов устремляется вверх, подвеска разгружается – в это мгновение контакт шин автомобиля с дорогой очень слабый или отсутствует вовсе.
Поведение автомобиля на буграх очень хорошо изучили раллисты. Они проносятся по ним с такой скоростью, что автомобиль взлетает высоко в воздух, и поэтому называются у них такие неровности не иначе как трамплины.
На поведение автомобиля в повороте, на его устойчивость оказывает влияние также и принцип конструкции автомобиля: передний, задний или полный привод, расположение двигателя. Важную роль играет и развесовка машины – в какой пропорции вес распределяется между передней и задней осью. Разумеется, автомобили с современными многорычажными подвесками охотнее исполняют волю водителя в поворотах, чем те, у которых подвески устаревшего образца. Но это чисто технические причины. Огромную роль играет и величина сил, действующих на машину в поворотах. Водители, не вникая в подробности, говорят в данном случае о том, как держат шины – хорошо или плохо? Влияет на устойчивость и дополнительный вес – едет ли водитель один или с пассажирами, есть ли тяжелый багаж, много ли топлива в баке. Ускорение в повороте, конструкция подвесок, давление в шинах, торможение – все это может самым непосредственным образом повлиять на то, какие шины – передние или задние – начнут терять сцепление первыми? Это очень важный вопрос.
Помните, что мы говорили про снос или занос? Если скользят передние шины, то это снос или недостаточная поворачиваемость. Если задние, то мы имеем дело с заносом, и это называется избыточной поворачиваемостью. Если скользят все четыре шины одновременно – это нейтральная поворачиваемость (рис. 10). Понятно, что последний вариант предпочтительнее, так как он не предусматривает вращение автомобиля вокруг вертикальной оси. Если автомобиль поворачивает в повороте, в то время когда водитель не крутит руль, то это и будет называться поворачиваемостью. Рассмотрим более подробно, что это такое.
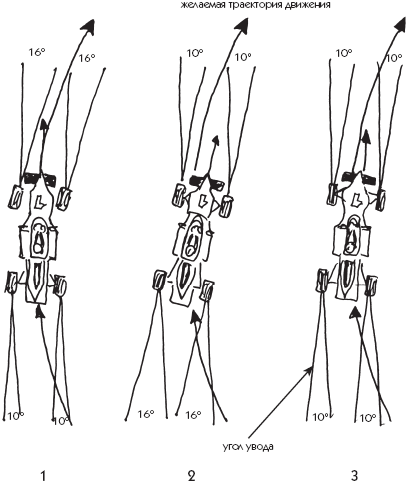
Рис. 10. ЭТА СХЕМА НАГЛЯДНО ДЕМОНСТРИРУЕТ РАЗЛИЧНЫЕ ВИДЫ ПОВОРАЧИВАЕМОСТИ:
1. Недостаточная поворачиваемость возникает, когда угол увода передних шин больше, чем у задних. Это снос передних колес, характеризующийся нежеланием автомобиля поворачивать. Траектория движения в повороте распрямляется.
2. Избыточная поворачиваемость возникает, когда угол увода задних шин больше, чем у передних. Это занос задних колес, когда машина поворачивает больше, чем того желает водитель.
3. При нейтральной поворачиваемости углы увода передних и задних шин – одинаковые.
Вначале небольшой экскурс в теорию движения автомобиля, вернее в тот подраздел, где рассматривается увод колес в повороте. Представим себе, что водитель повернул колеса в повороте на определенный угол. На маленькой скорости машина пошла по заданному радиусу. Если описать окружность, то она будет иметь определенный диаметр, независимо от того, сколько кругов по ней накатать (угол поворота колес остается неизменным). Начнем увеличивать скорость и увидим, что диаметр нашей окружности начал увеличиваться. Это увеличение вызывает увод шин, направление пятна контакта с покрытием площадки начало смещаться относительно диска колеса. Теоретическое направление качения шины стало отличаться от реального, заданного определенным поворотом руля. Простыми словами, направление шины стало отличаться от направления диска колеса (рис. 11). Именно этот угол, определяющий разницу теоретического и реального направления шины, и показывает величину увода, который привел к увеличению радиуса нашей окружности. Поедем еще быстрее. В какой-то момент сцепление шин достигнет критического значения, и они начнут скользить. Одновременно все четыре? Это не худший вариант, так как в этом случае скольжение просто еще больше увеличит диаметр окружности, но не вызовет вращение автомобиля вокруг вертикальной оси. Такое поведение автомобиля в момент потери сцепления и скольжения всех четырех шин и называют нейтральной поворачиваемостью. Ее характеризует то, что все четыре колеса имеют одинаковый угол увода. Именно так стараются настроить свои болиды автогонщики, что позволяет им полностью контролировать их поведение на больших скоростях в поворотах.
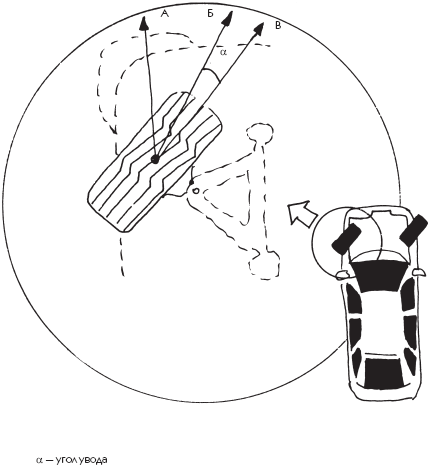
Рис. 11. УГОЛ УВОДА ШИНЫ
Б – направление движения
В – направление управляемого колеса
При увеличении скорости в повороте наступает момент, когда направление, куда смотрит шина, несколько отличается от того, куда в действительности сориентирован обод колеса. Угол между направлением качения шины и плоскостью вращения колеса называется углом увода.
На практике часто бывает по-другому: то передние колеса начнут скользить первыми, то задние. В первом случае угол увода передних колес будет больше, чем у задних. Машина перестанет слушаться повернутых передних колес и будет стремиться уйти от окружности по касательной. Это типичный пример сноса передней оси, а поведение автомобиля в такой ситуации называется недостаточной поворачиваемостью.
Если первыми сорвутся в скольжение задние колеса, это вызовет избыточную поворачиваемость, которую характеризует больший угол увода задних колес. Это классический пример заноса, когда задок машины норовит обогнать передние колеса, разворачивая ее носом к вершине поворота.
Смоделировать различные проявления поворачиваемости можно на площадке на одном и том же автомобиле. Для этого перед началом движения по окружности надо сначала спустить наполовину давление в передних шинах, чтобы они быстрее потеряли сцепление и начался снос передка. Затем восстановить давление в передних шинах и спустить наполовину в задних, что вызовет занос.
Зачем это знать обычному водителю? Любой автомобиль с нормальной загрузкой и средним сцеплением шин будет запрограммирован на определенное поведение в критической ситуации в повороте. Предположим, если речь идет о переднем приводе – проявится недостаточная поворачиваемость. Тот же самый автомобиль, но уже при других условиях, например, с полной загрузкой и на скользком покрытии при превышении критичной скорости, продемонстрирует избыточную поворачивае-мость, характерную для заднего привода. Главное понять, что водителя, который не знает, как поведет себя автомобиль в критической ситуации, какие ответные действия помогут ему не потерять контроль над ситуацией, нельзя назвать безопасным. Водитель обязан точно знать, что может случиться на дороге и как с этим бороться.
Конструкторы стараются придать своим творениям нейтральные качества в критических ситуациях. Именно это имеют в виду журналисты, описывая норов автомобильной новинки, сообщая читателю: «Управляемость выше всяких похвал». Но не все производители «вживляют» в свою продукцию характер нейтральной поворачиваемости, как например, спортивные модели БМВ и «порше».
Как застраховаться от неумелых действий водителей за рулем мощного и быстроходного автомобиля? Скорее всего, это будет выглядеть таким образом: влетая в поворот с завышенной скоростью, неопытный водитель испугается, резко бросит педаль газа и еще круче повернет руль, что вызовет занос задка. Именно поэтому инженеры стараются придать спортивным автомобилям склонность к недостаточной поворачиваемости, по крайней мере в первый момент скольжения шин. Такой характер поведения автомобиля будет несколько противостоять склонности к заносу задней оси в данных условиях. Но в целом заднеприводные автомобили сохраняют нейтральную поворачиваемость в начале скольжения, что в предельных режимах все равно выльется в избыточную поворачиваемость или занос. Точно так же переднеприводные автомобили могут сначала в скольжении демонстрировать нейтральное поведение, но более глубокое скольжение все-таки закончится ярким проявлением недостаточной поворачиваемости или сносом (рис. 12).
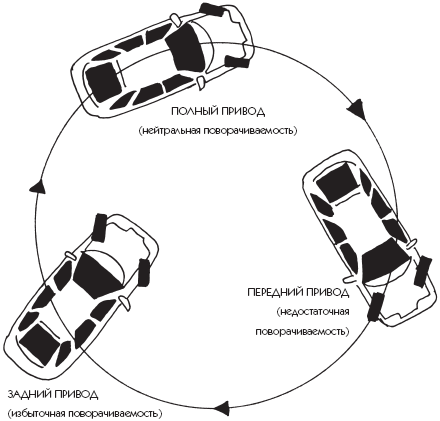
Движение по окружности – лакмусовая бумажка для проявления индивидуальных характеров машин с разными типами приводов. Задний привод тяготеет к избыточной поворачиваемости, передний – к недостаточной.
Нейтральная поворачиваемость характеризует машины с полным приводом.
Как и где проверить характер вашего автомобиля, его склонность к сносу и заносу? Для этого требуется площадка без ограждений, на которой можно безопасно выписывать окружность как минимум 30 м в диаметре. Чтобы быстро ехать на гоночной машине, гонщик обязательно проверяет поведение своей машины на тренировках. Он может, применяя те или иные приемы пилотирования, влиять на поведение машины или изменить настройки подвесок, чтобы добиться желаемой управляемости. Почему же подавляющее большинство водителей не желают проверить, как поведут себя их автомобили в критической ситуации?
Но главные проблемы начинаются, когда на автомобиль действуют сразу несколько сил. Например: автомобиль тормозит, потом поворачивает, причем вершина поворота находится на холме. Значит, на шины действуют силы отрицательного продольного ускорения, то есть торможения, бокового ускорения в повороте, да еще и вертикального, так как машину подбросило вверх. Причем не строго по указанным векторам, а во всех направлениях. Силы, действующие на шину в повороте, можно представить графически.
Но сначала, чтобы было понятнее, рассмотрим такую ситуацию: хозяйка налила вам в тарелку борщ, и вам следует проследовать с тарелкой в столовую. «Хорошо, что еще не до краев налила!» – бормочете вы и внимательно смотрите на тарелку, чтобы не пролить суп. А он так и норовит пролиться через край по направлению вперед и влево. Стоп! Почему вперед и влево? Да потому что вы только что затормозили в конце коридора и повернули вправо. Точно так же запас сцепления шин устремляется вперед и вправо при торможении и повороте влево на нашем графическом изображении. Посмотрите, как только вы снова пошли, суп устремился назад, точно так же как у автомобиля, трогающегося с места, загружается задняя ось, из-за чего сцепление задних шин возрастает.
Первым предложил использовать окружность для графического изображения работы шины в повороте профессор Вунибальд Камм (1893–1966), работавший в техническом университете в городе Штутгарт, в Германии. Вероятно, прежде чем господин Камм пришел к выводу, что можно графически изобразить запас сцепления шины в повороте, он так же покружил с тарелкой супа в руках. Только это был не борщ, а немецкий айнтопф, но на результаты эксперимента это не повлияло.
Итак, силы, действующие на шину в повороте, можно изобразить векторами. Эта сила может быть большой, средней или нулевой. Измерять ее нет никакой необходимости, для нашего графика это неважно (рис. 13). Важно только что длина стрелки изображает – максимум, половина стрелки – середину максимума и ноль – ничего. Направление стрелки возможно в любую сторону, поэтому обведем вокруг окружность. Расстояние от центра до окружности изображает в данном случае максимальное боковое или продольное ускорение. Что происходит на линии окружности? Это и есть зона турбулентности, здесь силы сцепления иссякают и уступают место силам скольжения. В этой зоне достигается максимальное сцепление шины с дорожным покрытием, шины находятся в состоянии контролируемой нестабильности. Окружность профессора Камма наглядно показывает, что тормозить и разгоняться в повороте можно, важно только правильно распределить соотношение сил продольных и поперечных ускорений. Конечно, на практике все намного сложнее, но это помогает понять принцип работы шины в повороте. Скажу по секрету, что благодаря этой теории и была изобретена антиблокировочная система тормозов.
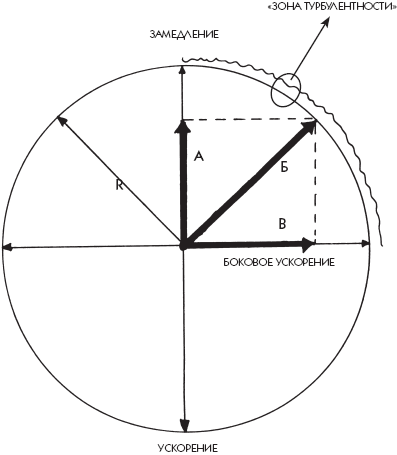
График показывает, что в данном повороте при боковых ускорениях «В», мы можем тормозить настолько интенсивно «Б», чтобы результирующий вектор «Б» был не больше, чем окружность, определяющая предел сцепления шин.
На границе окружности шина теряет сцепление и автомобиль становится неуправляемым.
Поверхность полусферы профессора Камма (рис. 14) показывает вертикальное ускорение. Мы говорили о том, что вершина поворота может находиться на холме или на изломе. В этот момент машина станет легче, а вектор устремится в направлении поверхности полусферы, снижая сцепление шины с покрытием дороги. В этот момент способность шины поворачивать, разгоняться или тормозить сильно ограничена. За разгрузкой подвески последует ее сжатие, и неизбежно возникнет прижимная сила – вес машины увеличится, сцепление шин улучшится. Графически это показывается увеличением окружности, отодвигающей зону начала скольжения. Это самый подходящий момент, чтобы тормозить или поворачивать.
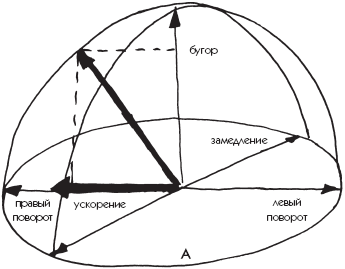
При проезде бугра автомобиль становится легче, и его возможности тормозить и поворачивать снижаются.
При проезде впадины – наоборот, окружность полусферы становится больше, значит, сцепление шин увеличивается под воздействием дополнительной нагрузки.
Подведем итог и суммируем вышесказанное. Управление автомобилем в движении создает силы, действующие на машину. Водитель может эти силы в процессе «борьбы» с дорогой и машиной увеличивать или уменьшать, но они все равно будут подчиняться законам физики. Грамотное управление автомобилем состоит в умении водителя понимать и не нарушать эти законы, а умело их использовать. Быстро, но безопасно ехать на автомобиле – значит умело балансировать на границе окружности профессора Камма (рис. 15). А в балансе главное чувствовать перемещение веса и не перебарщивать с ним. Иначе ваш борщ выплеснется из тарелки!
Быстро, но безопасно ехать на автомобиле – значит умело балансировать на границе окружности. А в балансе главное чувствовать перемещение веса.
Источник статьи: http://www.plam.ru/transportavi/noveishii_samouchitel_bezopasnogo_vozhdenija/p8.php