- Принцип поворота колесных машин
- Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
- Поворот ТС «по-гусеничному» принципу
- Шарнирносочлененные схемы поворота ТС для инженерных тягачей
- Назначение рулевого управления. Способы поворота автомобиля
- Понятие о повороте автомобиля и принцип действия рулевого управления
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
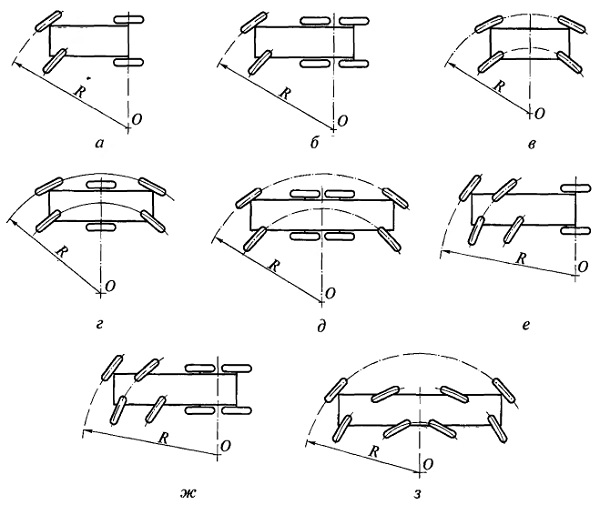
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
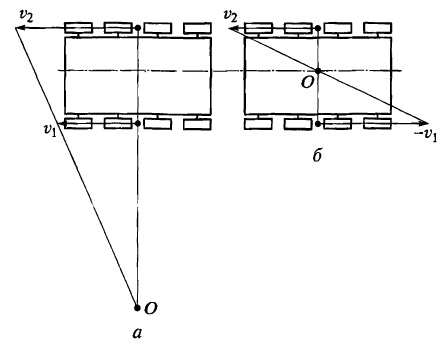
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
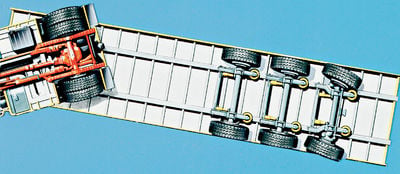
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Источник статьи: http://ustroistvo-avtomobilya.ru/rulevoe-upravlenie/printsip-povorota-kolesny-h-mashin/
Назначение рулевого управления. Способы поворота автомобиля

Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибрациям на рулевом колесе происходит передача водителю информации о состоянии дорожного покрытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повышенной утомляемости водителя и в тоже время должны информировать его о состоянии контакта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструкция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем: — поворота управляемой оси (а);
— поворота управляемых колес (б);
— поворота сочлененных звеньев (складывания рамы) (в).
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами поворачивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для перекатывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах.
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высокой скорости, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомобилях применяется редко, основная сфера использования — тихоходные тракторы, дорожно-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высокой скорости. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при условии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами.
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
Самоустанавливающаяся ось полуприцепа
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы.
Силовой способ поворота автомобиля аналогичен способу поворотов гусеничных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя наорганы управления трансмиссия подтормаживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практически на месте. Но силовой способу правления на современных автомобилях почти не применяется, что связано с низкой точностью управления на большой скоростяи, высоким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Вместе с тем силовой способ управления поворотом все же применяется в современных автомобилях, но не в качестве основного, а как основа функционирования электронной системы стабилизации траектории ESP.
Источник статьи: http://wiki.zr.ru/%D0%9D%D0%B0%D0%B7%D0%BD%D0%B0%D1%87%D0%B5%D0%BD%D0%B8%D0%B5_%D1%80%D1%83%D0%BB%D0%B5%D0%B2%D0%BE%D0%B3%D0%BE_%D1%83%D0%BF%D1%80%D0%B0%D0%B2%D0%BB%D0%B5%D0%BD%D0%B8%D1%8F._%D0%A1%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B_%D0%BF%D0%BE%D0%B2%D0%BE%D1%80%D0%BE%D1%82%D0%B0_%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8F
Понятие о повороте автомобиля и принцип действия рулевого управления
Рулевое управление обеспечивает движение автомобиля по заданному направлению. Изменение направления движения автомобиля осуществляется поворотом его передних управляемых колес.
Движение автомобиля при повороте происходит вокруг центра О (рис. 16.1, я), при этом колеса автомобиля во избежание бокового скольжения должны описывать дуги концентрических окружностей. Центр поворота находится в точке пересечения продолжения оси вращения задних колес и осей вращения обоих управляемых колес. Поэтому управляемые колеса 2 при повороте автомобиля должны быть повернуты на разные углы. При этом угол поворота внутреннего колеса по отношению к центру поворота должен быть больше угла поворота внешнего колеса. Такая схема поворота конструктивно обеспечивается рулевой трапецией, сторонами которой являются балка / управляемого моста, поперечная рулевая тяга 3 и рычаги поворотных кулаков. Рулевая трапеция вместе с механизмами и устройствами, обеспечивающими поворот автомобиля, составляет рулевое управление.
Простейшая схема рулевого управления показана на рис. 16.1, б. При вращении рулевого колеса 4 поворачивается рулевой вал б, расположенный внутри рулевой колонки 5. На нижнем конце вала закреплен червячный механизм 7, сообщающий угловые перемещения сошке 8: С помощью продольной тяги 9и рычага //сошка поворачивает левый поворотный кулак с расположенным на его цапфе колесом. Одновременно левый кулак посредством рычага 10 и поперечной тяги 3 поворачивает через рычаг 13 правый поворотный кулак /2, а вместе с ним и колесо, установленное на его цапфе.
Рулевое управление состоит из рулевого механизма и рулевого привода. Для облегчения управления автомобилем в рулевой привод может входить усилитель. Однако легкость управления автомобилем зависит прежде всего от общего передаточного числа рулевого управления, которое определяется отношением угла поворота рулевого колеса к углу поворота управляемых колес автомобиля. Общее передаточное число рулевого управления равно произведению передаточных чисел рулевого механизма и рулевого привода.
а — схема поворота управляемых колес; б — схема действия рулевого управления; / — балка управляемого моста; 2 — управляемые колеса; 3 — поперечная рулевая тяга; 4— рулевое колесо; 5— рулевая колонка; б— рулевой вал; 7 — червячный механизм; 8— сошка; 9— продольная тяга; /0, II— рычаги левого поворотного кулака; 12— правый поворотный кулак; 13— рычаг правого поворотного кулака
Рулевые механизмы


| Рис. 16.1. Схема рулевого управлення и движения автомобиля при повороте: |
| Угол поворота поворота внешнего колеса |
Рулевой механизм служит для передачи усилия от рулевого колеса на рулевой привод и уменьшения усилия, необходимого для поворота автомобиля. Передаточное число рулевых механизмов находится в пределах 15. 30, вследствие чего усилие, передаваемое сошкой, значительно больше усилия, приложенного к рулевому колесу. Применяются также рулевые механизмы с непо
стоянным передаточным числом, которое увеличивается по мере перемещения их рабочей пары к среднему положению. Это способствует уменьшению обратных ударов в рулевое колесо при насаде управляемых колес на неровности дороги. С этой же целью в приводе рулевого управления уменьшают плечо А поворота колеса (см. рис. 15.3, а).
В зависимости от нагрузки на управляемый мост автомобиля предусмотрено несколько типов рулевых механизмов. Наиболее распространенными из них являются червячно-роликовые (червяк—ролик, червяк—сектор) и винтореечные (винт—шариковая гайка—сектор). Червячно-роликовый рулевой механизм в виде червячной передачи с червяком глобоидной формы и двух-, трехфебневым роликом (червяк—ролик) применяется на большинстве легковых и многих грузовых автомобилях. Рулевой механизм такого типа показан на рис. 16.2. В картере / на двух конических роликоподшипниках вращается глобоидный червяк 5, установленный на валу 6 рулевого колеса. В зацепление с червяком входит трсхгрсбневый ролик 3% вращающийся на цилиндрическом роликоподшипнике, установленном на оси 7, запрессованной в фасонную головку вала 2 рулевой сошки.
Опорами вала сошки служит с одной стороны роликоподшипник
 Рис. 16.2. Рулевой механизм типа червяк—трсхгрсбневый ролик: / — картер; 2— головка рулевой сошки; 3— трехгребневый раї и к; 4— регулировочные прокладки; 5— червяк; 6 — вал; 7 — ось; 8 — роликоподшипник; 0— стопорная шайба; 10 —кол пачковая гайка; II— регулировочный винт; 12—вал сошки; 13— сальник; 14 —сошка; 15— гайка крепления сошки; 16— бронзовая втулка; Н — регулируемая глубина зацепления ролика с червяком Рис. 16.2. Рулевой механизм типа червяк—трсхгрсбневый ролик: / — картер; 2— головка рулевой сошки; 3— трехгребневый раї и к; 4— регулировочные прокладки; 5— червяк; 6 — вал; 7 — ось; 8 — роликоподшипник; 0— стопорная шайба; 10 —кол пачковая гайка; II— регулировочный винт; 12—вал сошки; 13— сальник; 14 —сошка; 15— гайка крепления сошки; 16— бронзовая втулка; Н — регулируемая глубина зацепления ролика с червяком |
вала 12 сошки (в пределах величины Л) с помощью регулировочного винта //, установленного в крышке картера. Винт закрыт колпачковой гайкой 10 и фиксируется стопорной шайбой 9 со штифтом.
Рабочая пара типа червяк—ролик имеет зацепление с переменным зазором. В средней части, соответствующей положению колес для движения автомобиля по прямой, зазор имеет минимальную величину (0,03 мм); при повороте рулевого колеса он увеличивается, так как уменьшается высота зубьев сектора от середины к крайним точкам. При этом по мере поворота автомобиля в ту или иную сторону свободный ход рулевого колеса также возрастает, достигая в крайних положениях 25. 30*. Наличие переменного зазора в соединении червяк — ролик повышает чувствительность рулевого управления при среднем положении колес и облегчает вывод рулевого колеса из крайних положений. Рулевой механизм данного типа имеет малые потери на трение, так как при работе ролик не скользит, а катится по червяку, вследствие чего снижается изнашивание деталей и затрачивается меньше усилий на управление автомобилем.
На переднеприводных легковых автомобилях семейств ВАЗ, «Москвич», ЗАЗ применяются реечные рулевые механизмы типа шестерня—рейка с прямозубым (на автомобиле ВАЗ-2109) или косозубым зацеплением (на остальных автомобилях), которые конструктивно хорошо сочетаются с переднеприводной компоновкой автомобиля при поперечном или продольном расположении двигателя.
Указанный рулевой механизм (рис. 16.3, а) состоит из картера 89 внутри которого установлен вал 10, изготовленный как одно целое с косозубой шестерней 7, находящейся в зацеплении с зубчатой рейкой 3. Вал 10 вращается в двух шариковых подшипниках 2, натяг которых производится через распорную втулку I и регулировочные прокладки под крышкой 9 (автомобили семейства ЗАЗ).
Надежное беззазорное зубчатое соединение приводной шестерни 7 с рейкой по всей величине ее хода обеспечивает металло- керамический упор б за счет пружины 5. Радиальные усилия, действующие на рейку, воспринимаются упором и через пружину 5 передаются на крышку 4. В сборе с тягами 15 рулевой механизм крепится двумя скобами 16 на панели передка кузова. В верхней части вала на шлицах крепится рулевое колесо /7, которое посредством установленного на нем демпфирующего устройства повышает активную безопасность рулевого управления.
На автомобилях большой полной массы для облегчения управления ими рулевые механизмы имеют большие передаточные числа. При этом не допускается значительного повышения удельной нагрузки на поверхности рабочей пары рулевого механизма. В рулевых управлениях таких автомобилей применяют механизм чер-
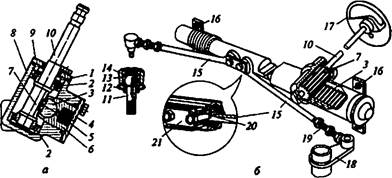 Рис. 16.3. Рулевое управление переднеприводных легковых автомобилей: а — рулевой механизм типа шестерня—рейка; б — рулевой привод и общая компоновка рулевого управления; / — распорная втулка; 2 — шарикоподшипники; 3 — зубчатая рейка; 4 — крышка упора; 5 — пружина; б — упор; 7 —: шестерня; 8 — картер; 9 — крышка картера; 10 — вал-шестерня; // — шаровой палец; 12 — уплотнитель; 13 — вкладыши; /4 — пружина шарнира; /5 — горизонтальные тяги; 16 — скобы крепления рулевого механизма; 17— рулевое колесо; 18— поворотные рычаги; 19— регулировочные втулки; 20— резинометаллк» ческие шарниры; 21 — крепежная пластина Рис. 16.3. Рулевое управление переднеприводных легковых автомобилей: а — рулевой механизм типа шестерня—рейка; б — рулевой привод и общая компоновка рулевого управления; / — распорная втулка; 2 — шарикоподшипники; 3 — зубчатая рейка; 4 — крышка упора; 5 — пружина; б — упор; 7 —: шестерня; 8 — картер; 9 — крышка картера; 10 — вал-шестерня; // — шаровой палец; 12 — уплотнитель; 13 — вкладыши; /4 — пружина шарнира; /5 — горизонтальные тяги; 16 — скобы крепления рулевого механизма; 17— рулевое колесо; 18— поворотные рычаги; 19— регулировочные втулки; 20— резинометаллк» ческие шарниры; 21 — крепежная пластина |
вяк—сектор с большой поверхностью зацепления или механизм с двумя рабочими парами: винт с гайкой на циркулирующих шариках и зубчатую рейку с сектором. Последнее нашло широкое распространение на автомобилях КамАЗ, ЗИЛ и др.
В качестве примера рассмотрим устройство винтореечного рулевого механизма типа винт—шариковая гайка—сектор автомобиля ЗИЛ-431410 и его модификаций. Картер / (рис. 16.4) рулевого механизма установлен с левой стороны автомобиля на лонжероне рамы и вынесен вперед за пределы балки передней оси. Колонка б вала рулевого колеса закреплена на кронштейнах внутри кабины. Вал рулевого механизма соединен с валом рулевого колеса при помощи карданного вала 7, имеющего два карданных шарнира 8. Последнее вызвано трудностью размещения сплошного вала рулевого механизма из-за установки на автомобиле У-образ- ного двигателя и максимально приближенной к нему кабины.
Рулевой механизм объединен в одном агрегате с гидроусилителем, насос 2 которого совместно с масляным бачком 3 крепится к двигателю. Насос и рулевой механизм соединены между собой гибкими шлангами; подводящим масло шлангом 5 высокого давления и отводящим масло шлангом 4 низкого давления. Через сошку 13 усилие от рулевого механизма передается к приводу управляемых колес.
Рис. 16.4. Схема рулевого управления автомобиля ЗИЛ-431410:
/ — картер: 2— иасос гидроусилителя; 3 — масляный бачок; 4— шланг низкого давления; 5 — шланг высокого давления; 6 — колонка вала рулевого колеса; 7 — карданный вал; £ — шарниры; 9 — поперечная рулевая тяга; /0. // — рычаги правого поворотного кулака; 12 — продольная рулевая тяга; 13 — сошка рулевого
Рулевой механизм (рис. 16.5) состоит из силового цилиндра 2, винта 4, гайки 5 с шариками 7, поршня-рейки 3, зубчатого сектора 16с валом 17. Картер рулевого механизма является одновременно корпусом цилиндра 2, закрытого в нижней части крышкой /. Передаточное число рулевого механизма равно 20.
Между промежуточной 8 и верхней 12 крышками цилиндра установлен корпус 10 клапана управления гидроусилителем, внутри которого размешены плунжеры 14 и пружины 13, взаимодейству-
 Рис. 16.5. Рулевой механизм типа винт—шариковая гайка—сектор: Рис. 16.5. Рулевой механизм типа винт—шариковая гайка—сектор: |
/ — крышка цилиндра; 2— силовой цилиндр — картер; 3— поршень-рейка; 4— винт рулевого механизма; 5— шариковая гайка;6— желоб для перекатывания шариков; 7— шарики; промежуточная крышка; 9 — золотник; 10— корпус клапана управления; // — гайка крепления винта; 12— верхняя крышка; 13— пружина плунжера; 14— плунжер; 15 — стопорный винт, 16— зубчатый сектор; /7 — вал сектора; 18— сошка; 19— боковая крышка; 20— стопорное кольцо регулировочного винта; 21 —
Источник статьи: http://infopedia.su/12×4657.html