Системы навигации автомобиля (GPS)
Навигационные системы (глобальная позиционирующая система или GPS — Global Positioning System) находят все более широкое применение в странах Западной Европы, США, Японии. Начинается применение этих систем и в странах бывших странах Советского Союза, однако развитие систем навигации сдерживается главным образом из-за отсутствия карт местности.

Главными задачами система навигации являются:
- определение нахождения автомобиля в текущий момент
- ввод пункта назначения с определением оптимального маршрута
При выборе маршрута предлагается 3 варианта – быстрый, нормальный и короткий. Кроме этого указывается где находятся платные дороги и особенности движения по каждому маршруту.
Для того чтобы пользоваться GPS-навигацией, нужен как минимум GPS-приемник. Но само по себе он не более чем спутниковый компас, знающий свои точные координаты. Чтобы связать эти координаты с конкретной цифровой картой местности, нужно более сложное устройство, например, GPS-навигатор со встроенным GPS-приемником.

Что такое навигатор?
GPS-навигаторы – устройства со сравнительно простой программной оболочкой, ориентированные преимущественно на решение навигационных задач и способные работать только с одним предусмотренным производителем типом карт.
Вычисление положения GPS-приемника осуществляется на основе заранее известных координат спутников системы. Физически это выражается в том, что исходными данными для решения задачи позиционирования являются расстояния от объекта до всех видимых им в данный момент спутников. Для упрощения допустим, что все видимые спутники находятся на своих орбитах в неподвижном состоянии.
Обратимся к геометрии
Искомый объект находится на поверхности сферы, описанной вокруг точки местоположения сателлита и имеющей радиус, равный расстоянию до объекта. Для определения местоположения контакта с одним спутником недостаточно. Пересечение сфер от двух спутников дает окружность — задача из трехмерной превратилась в двухмерную. Теперь известно, что приемник находится где-то на полученной окружности. Сфера, очерченная вокруг третьего видимого спутника, пересекает окружность в двух точках, одна из которых является паразитной, так как находится либо в недрах земного шара, либо в верхних слоях атмосферы.
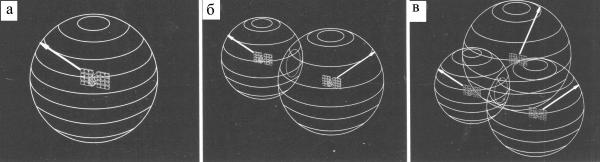
Рис. Обнаружение объекта спутниками:
а – сфера от одного спутника; б – пересечение сфер от двух спутников; в – пересечение сфер от трех спутников
Оставшаяся точка и характеризует координаты приемника. Расстояния до спутников (радиусы описанных сфер) вычисляются просто – на основе фиксации времени прохождения сигнала до объекта и его скорости.
Для определения положение спутников на орбите помимо совокупности спутников, рассредоточенных по стационарным орбитам, существует наземный комплекс управления. В его состав входят станции слежения, поддерживающие постоянный контакт с элементами орбитальной группировки. По полученным данным в центре управления вычисляются точные координаты искусственных спутников и через станции связи передаются на летательные аппараты. При расчетах принято, что скорость распространения сигнала равна скорости света. Поэтому необходимо учесть еще точность и синхронизацию работы часовых механизмов, которыми оснащены спутник и приемник, а также искажения, вызванные различными препятствиями на пути прохождения информационной волны. Для устранения ошибок в компьютере приемника используются специальные алгоритмы, которые корректируют время до тех пор, пока местоположение приемника не будет определено с заранее заданной погрешностью. Алгоритм также учитывает данные, поступившие от четвертого, пятого и др. сателлитов, которые находятся в «зоне видимости» приемника.
Отметим, что полноценная группировка, которая обеспечит покрытие всей поверхности земного шара, должна включать 24 орбитальных объекта, то есть максимальное количество видимых приемником спутников в любой точке земли — 12 единиц. Однако на сегодняшний день количество действующих аппаратов систем навигации уже составляет 30 единиц.
На рисунке показана структура навигационной системы. Система может осуществлять навигационное счисление, определять положение автомобиля на карте местности по конфигурации пройденного пути, определять абсолютные координаты с помощью спутниковой системы GPS. С помощью навигационного счисления определяют относительное положение автомобиля и направление движения по информации, полученной с датчиков скорости вращения колес и азимута.
Конфигурация участка пройденного пути, полученная с помощью навигационного счисления, сравнивается с конфигурацией дорог, нанесенных на карту. Определив дорогу, по которой движется автомобиль, система находит и его текущие координаты. Более точное определение координат автомобиля на карте производится с помощью GPS по широте и долготе. Считается, что для практических целей достаточно знать координаты автомобиля с точностью до размера половины квартала, т. е. ±100 метров.
Автомобильная навигационная система должна иметь в своем составе датчики пройденного пути и направления движения.
Датчик пройденного пути
Датчик пройденного пути — это та или иная конструкция электронного одометра, информация в который поступает с датчиков скорости вращения колес ABS. Одометрам присущ ряд систематических погрешностей, которые необходимо корректировать. К ним относятся:
- Разница в диаметрах новой и изношенной покрышки дает погрешность в определении пройденной дистанции до 3%.
- За счет увеличения диаметра покрышки от центробежной силы на каждые 40 км/час скорости автомобиля погрешность в определении пройденной дистанции увеличивается на 0,1…0,7%.
- Изменение давления в шинах на 689 кПа увеличивает погрешность на 0,25…1,1%.
Для определения направления движения автомобиля обычно используются датчик азимута, датчики скорости вращения колес, гироскопы.

Рис. Структура навигационной системы
Датчик азимута
Датчик азимута (компас) использует магнитное поле Земли и представляет собой кольцевой сердечник 2 из ферромагнетика, на который намотаны обмотка возбуждения 1и перпендикулярно друг другу две выходные обмотки 3 и 4. К обмотке возбуждения приложено синусоидальное напряжение. При отсутствии внешнего магнитного поля в выходных обмотках наводится ЭДС взаимоиндукции, также синусоидальная, с нулевым средним значением. При наличии постоянного внешнего магнитного поля (магнитного поля Земли) происходит искажение синусоидальной формы магнитного потока в сердечнике за счет наложения постоянной составляющей и напряжений выходных обмоток.
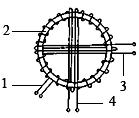
Рис. Геомагнитный датчик азимута:
1 – обмотка возбуждения; 2 – кольцевой сердечник из ферромагнетика; 3 – выходная обмотка с координатой X; 4 – выходная обмотка с координатой Y
Датчики скорости вращения колес
В системах GPS используются датчики скорости вращения передних колес, применяемые для ABS. Угол поворота автомобиля определяется по разности путей, проходимых при повороте левым и правым колесом.
Гироскоп
При использовании гироскопа определяется угловая скорость автомобиля на повороте и интегрируется для определения угла поворота. В навигационных системах используются различные типы гироскопов. Ниже в качестве примера рассматривается применение газового гироскопа.
Гироскоп работает следующим образом. Насос создает поток газа (гелия) 2 с заданной скоростью истечения и направляет его через сопло 1на две нагретые проволочки датчика w1 и w2 (рис.). Угловая скорость автомобиля определяется по изменению сопротивлений проволочек датчика. Когда поток гелия выходит из сопла насоса, он постепенно расширяется.
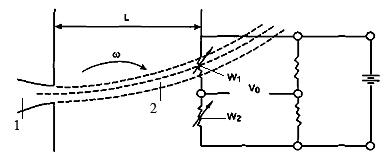
Рис. Измерительная система гироскопа (расположение потока газа при повороте)
Когда автомобиль движется прямо, распределение скоростей симметрично относительно проволочек, они охлаждаются одинаково и на выходе мостовой схемы, частью которой являются проволочки, пулевое напряжение. При повороте возникает сила Кориолиса, смещающая газовый поток, проволочки охлаждаются неравномерно, их сопротивления электрическому току различны, на выходе мостовой схемы появляется напряжение, пропорциональное угловой скорости автомобиля на повороте.
Навигационное счисление – это метод определения координат движущегося объекта (автомобиля, самолета, судна и т. д.) по отношению к стартовой точке. Используется сумма векторов пройденных расстояний, информация о направлениях поступает с датчика азимута или датчика скорости вращения колес. На рисунке показано применение навигационного счисления к определению координат объекта (автомобиля).

Рис. Определение координат автомобиля методом навигационного счисления:
X0, Y0 – начальные координаты; Δi – приращение текущего положения; θi – угловое положение; X, Y – координаты нахождения автомобиля
Корпус автомобиля выполнен из металла и других магнитных материалов и способен намагничиваться внешними полями (например, в магнитном поле, создаваемом электродвигателями электровоза па железнодорожном переезде и т. д.). В этом случае возникает систематическая погрешность в определении направления движения автомобиля. Паразитное магнитное поле компенсируется дополнительными магнитами вблизи компаса.
Магнитное поле также искажается в тоннелях, на металлических мостах, при движении вдоль автопоездов. Применение датчиков скорости вращения колес наряду с компасом часто решает эту проблему. Датчики скорости вращения колес не чувствительны к таким искажениям, на практике датчики азимута и скорости вращения колес дополняют друг друга при определении направления движения автомобиля.
Навигационное счисление дает низкую точность определения текущих координат объекта. Для автомобиля приходится корректировать координаты, определенные методом навигационного счисления каждые 10…15 км. Корректировка будет корректной если автомобили передвигаются по дорогам, которые нанесены на электронную карту.
Электронные карты
В некоторых навигационных системах картографическая информация хранится централизованно и передается на автомобиль по радиоканалу, но в большинстве случаев навигационная система предполагает наличие необходимой базы данных на борту автомобиля.
CD-ROM используется для хранения картографической и дорожной информации с целью сравнения конфигураций дорог и пройденного пути, поиска оптимального маршрута, вывода карты местности на дисплей.
В матричном формате каждому элементу карты (пикселю) соответствуют свои значения декартовых координат X-Y. Матричные карты требуют много места в памяти компьютера или па носителе информации и неудобны для математических операций при прокладке и слежении за маршрутом.
В векторном формате дороги, улицы представляются последовательностями отрезков прямых, описанных аналитически, пересечения – узлами. Узлы идентифицируют координатами – долготой и широтой. Если дорога (улица) не прямая, в точке излома также помещается узел. Таким образом, дороги (улицы) любой конфигурации аппроксимируются набором векторов и узлов.

Рис. Улицы и узлы на векторной карте
Имеющиеся карты или изображения местности, полученные с самолетов и спутников, сканируются. Затем специальное программное обеспечение трансформирует изображение сначала в матричный, а затем в векторный формат.
Электронная карта несет такую информацию, как номера дорог, названия улиц, номера домов между перекрестками, одностороннее или двухстороннее движение на улице, названия отелей, ресторанов и т. д.
Сенсорный переключатель на экране позволяет менять режим вывода изображения, выбирая раздельный или полный экран со стрелочными указателями поворотов, список поворотов или информацию о съездах с автострады.

Ориентирование на карте местности по конфигурации пройденного пути
Сначала навигационная система определяет, какие из близлежащих дорог могут соответствовать координатам автомобиля, определенным навигационным счислением. Затем делается сравнение, выбирается наиболее подходящая дорога и корректируются координаты автомобиля по карте. Когда автомобиль достигает перекрестка, выбор дороги определяется направлением движения. Если дороги на перекрестке выглядят примерно одинаково, навигационный компьютер прослеживает их по карте вперед и определяет коэффициент корреляции для каждой из дорог по отношению к требуемому маршруту. Выбирается дорога с наибольшим коэффициентом корреляции.
Навигационные системы позволяют получать информацию голосовым управлением, что позволяет получать необходимые сведения не отрываясь от дороги. В общей сложности современные системы распознают до 1500 слов.
Для подробного рассмотрения выбранного участка можно его приблизить или удалить для охвата более обширной зоны. На дисплей можно одновременно выводить две карты, одна из которых показывает более детальный ряд, а другая дает более широкий охват. В случае необходимости имеется возможность найти ближайший отель, ресторан, заправку, СТО, место парковки и т.д.
Для изучения маршрута следования водитель может выполнить предварительный просмотр маршрута.
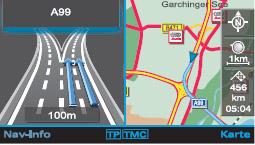
За 500 метров до приближающегося перекрестка на экран автоматически выводится увеличенная схема развязок. По мере приближения к перекрестку будет звучать голосовое сообщение, напоминающее водителю о предстоящих действиях. Если водитель пропустил нужный поворот, система сама скорректирует маршрут.
В случае недостаточной информации о местонахождении пункта назначения система навигации может производить поиск по адресу, почтовому индексу, по географической широте и долготе, по карте, по перекресткам и въездам-съездам с автострады. В память системы может вводится информация о местах, которые водитель желает посетить снова.
При возникновении автомобильных пробок или затрудненном дорожном движении на пути следования выбранного маршрута, система рассчитывает и предлагает альтернативный маршрут.
Выбор оптимального маршрута
Кроме определения текущих координат автомобиля, навигационная система также может выдавать информацию, облегчающую выбор оптимального пути следования к месту назначения. Для этого навигационный компьютер рассматривает дорожную сеть между исходным пунктом и пунктом назначения и выбирает кратчайший маршрут. Примером метода определения кратчайшего пути по карте является алгоритм Дейкстра (Dijkstra algorithm).
В алгоритме Дейкстра производится определение всех пересечений дорог от стартовой точки и вычисляются кратчайшие пути до каждой точки пересечения. Например, если имеется дорожная сеть, как на рисунке, поиск пересечений начнется от начальной точки А. Сначала будут рассмотрены пересечения В и С. Расстояния от точки А до каждого из пересечений указаны внутри кружочков. Затем рассматриваются пересечения Е и F, соединяющиеся с точкой С, для этих пересечений указано расстояние от стартовой точки А. В-третьих, рассматриваются пересечения D и Е, соединенные с точкой В, на рисунке б указаны расстояния от стартовой точки А до D и Е. При этом расстояние до точки Е указано через точку С, т. к. оно меньше, чем через D (было бы 8). Точка D связана с точкой Е, и маршрут через Е оказывается короче. Кратчайшим путем до D оказывается маршрут A-C-E-D.
Использование этого алгоритма позволяет определить кратчайший маршрут к месту назначения. Располагая современной навигационной системой, водитель может не опасаться сбиться с пути.

Дальнейшее развитие GPS получило в развитии интеллектуальных транспортных систем (ITS — Intelligent Transportation Systems).
Подобную систему Extended Floating Car Data-System (XFCD) представила компания BMW.
Испытание проводилось на специальной тестовой трассе в SBC Park и было призвано продемонстрировать возможности системы. Например, автомобиль попадает на скользкую дорогу. За считанные секунды система обрабатывает информацию и предупреждает в режиме реального времени следующий за ним автомобиль. Та же информация в то же самое время передается стационарным службам движения, которые статистически обрабатывают поступающие данные и рассылают их обратно другим участникам движения.
Система определения дорожной ситуации XFCD станет в будущем усовершенствованным последователем существующей системы Floating Car Data, что переводится как «данные с движущегося автомобиля». Уже сегодня с помощью FCD автомобили посылают свои данные о местонахождении в определенный момент времени на центральный пульт движения, который сопоставляет получаемые сообщения с сообщениями других автомобилей, оснащенных FCD, с целью распознавания дорожных и внештатных ситуаций. Система XFCD способна сама распознавать дорожную ситуацию, анализировать все имеющиеся данные в автомобиле и передавать обработанные данные на центральный пульт движения. Параллельно система способна через систему-коммуникатор «Авто-Авто» предупреждать другие автомобили в зоне действия передатчика.
XFCD функционирует на базе имеющейся навигационной системы, и ее ввод в эксплуатацию заключается лишь в загрузке программы. Введение бортовой сети позволяет синхронно задействовать целый спектр возможностей. В устроенном таким образом современном автомобиле система получает доступ и совмещение с множеством других информационных блоков управления. Это ближний и дальний свет, противотуманное освещение, термометр внешней среды и кондиционер, тормоза и навигационная система, сенсор дождя и омыватель стекла, а также прочие не менее важные мелочи. Все эти механизмы функционируют в зависимости от дорожной ситуации. Так, на понижение температуры окружающей среды, лед или даже неожиданное появление масла на участке дороги автомобиль тут же отреагирует регулированием системы стабилизационного контроля (DSC) и скорости движения.
Еще одно неоспоримое преимущество системы XFCD заключается в возможности передачи сообщений напрямую другим автомобилям. Информация передается посредством Ad-hoc-сети всем автомобилям в ближайших окрестностях. Каждый автомобиль, в зависимости от ситуации, выполняет роль или отправителя, или получателя, или передатчика. Преимущество зарекомендовавшей себя технологии Multi-Hopping неоспоримо: Ad-hoc-сеть организуется автономно, обладает необходимой дальностью радиуса действия и не требует создания специальной инфраструктуры.
Источник статьи: http://ustroistvo-avtomobilya.ru/bez-rubriki/sistemy-navigatsii/