Сцепной вес
Wikimedia Foundation . 2010 .
Смотреть что такое «Сцепной вес» в других словарях:
СЦЕПНОЙ ВЕС — часть веса, приходящегося на ведущие (движущие) оси автомобиля, колёсного трактора, локомотива и т. д., передающаяся на путь. С. в, определяет максимально возможное тяговое усилие (тягу) между колёсами и дорогой (рельсами) … Большой энциклопедический политехнический словарь
Сцепной вес локомотива — Сцепной вес локомотива сумма всех нагрузок от движущих (сцепных) колёс локомотива на рельсы. Используется для создания силы сцепления между колёсами и рельсами и позволяет превратить окружное усилие на ободе движущих колёс во внешнюю силу… … Википедия
СЦЕПНОЙ ВЕС ЛОКОМОТИВА — часть общего веса локомотива, передающаяся на его движущие осн. Только эта часть веса используется для создания между движущими колесами и рельсами силы трения, позволяющей превратить работу машины в силу тяги для передвижения поезда; остальная… … Технический железнодорожный словарь
СЦЕПНОЙ — СЦЕПНОЙ, сцепная, сцепное (спец.). прил., по знач. связанное с работой чего нибудь в сцепе, в связи с другим. Сцепная мощность трактора. Сцепные оси паровоза. Сцепной вес (вес, приходящийся на ведущие оси локомотива). || Сцепляющийся, соединяемый … Толковый словарь Ушакова
вес сцепной — Усилие, приходящееся на ведущие оси движителя и определяющее величину тягового усилия [Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)] Тематики строит. машины, оборуд., инструмент прочие EN cohesion weight DE… … Справочник технического переводчика
ВЕС СЦЕПНОЙ — усилие, приходящееся на ведущие оси движителя и определяющее величину тягового усилия (Болгарский язык; Български) сцепно тегло (припадащо се на задвижващи колела или на гьсенична верига) (Чешский язык; Čeština) adhezní tíže (Немецкий язык;… … Строительный словарь
ФД — Феликс Дзержинский … Википедия
Паровоз ФД — «Феликс Дзержинский» Паровоз ФД21 3125 Основные данные … Википедия
Источник статьи: http://dic.academic.ru/dic.nsf/ruwiki/1247138
Сцепной вес-вес, приходящийся на ведущие колеса транспортного средства и обеспечивающий сцепление их с дорогой
Сцепной вес трактора увеличивают для уменьшения буксования ведущих колес при работе с полной нагрузкой. Для увеличения сцепного веса трактор снабжают специальными грузами, закрепленными на дисках ведущих колес. При работе с навесными машинами сцепной вес трактора можно увеличивать с помощью запчасти к трактору гидроусилителя сцепного веса. Для дополнительного увеличения сцепного веса, необходимо при работе трактора в особо тяжелых условиях, камеры ведущих колес заполняют жидкостью до три четверти их обьема
Силовой баланс транспортного средства-равенство движущей силы сумме сил сопротивления движению транспортного средства
Уравнение силового баланса — это уравнение, выражающее равенство продольных сил, движущих автомобиль и оказывающих сопротивление его движению. При выводе уравнения силового баланса будем исходить из схемы сил, действующих на автомобиль при его движении
При движения автомобиля некоторые силы могут отсутствовать. Так, например, при равномерном движении нет силы сопротивления инерции (Рj = 0), при отсутствии прицепа — силы на крюке (Ркр=0), а при отсутствии продольного уклона — силы сопротивления подъему (Рa = 0). При отключении двигателя от трансмиссии, например, при движении накатом или переключении передачи, отсутствует индикаторная сила тяги (Рi). Однако во всех случаях уравнения сохраняют свою силу.
Динамический фактор.Рк = Рf ± Рh ± Рw± Рj; Рψ = Рf + Рh ;Рк = Рψ ± Рw± Рj; Рк — Рw = Рψ ± Рj= Ga*y + Ga*da*ja/g; делим на Ga; Рк — Рw/Ga=*y + da*ja/g; Рк — Рw/Ga – представляет собой отношение избыточной силы тяги к полной силе тяги тяжести авто и называется динамическим фактором Да. По другому можно сказать что динамич фактор это св-во авто быстро ускоряться Да=y + da*ja/g; j=0, Да=y. Для оценки динамич св-в авто – способности авто преодолевать разные дорожные сопротивления и ускоряться введён показатель – динамический фактор. Зная динамический фактор можно об авто судить по преодолеваемого дорожного сопротивления авто на разных передачах и по скоростям движения по разным дорожным условиям. Pсв=PT-PW. Динамич фактор дополненный номограммой загрузки авто представляет собой динамический паспорт D0=Pсв/G0. При небольших скоростях в пределах 4-5 м/с значением силы сопротивления воздуха можно пренебречь (Рw=0) и тогда Да=Рк — Рw/Ga; Да=Рк/Ga; Да= (Ga*j — Рw)/Ga; Ga*j — сила тяги которая может быть реализована в конкретных условиях движения с учетом коэффициента сцепления колес с дорогой. Если сила тяги превышает значение Ga*j, то наступает буксование ведущих колес. При буксовании ведущих колес скорость авто не велика и Рw можно приравнять к 0. Да =Ga*j/Ga £j чтобы машина двигалась. В общем случае условием движения машины будет y£ Да £j. Динамической характеристикой называется графическая зависимость динамического фактора от скорости движения авто на различных передачах. С помощью динамической характеристики можно определить макс скорость движения авто в заданных условиях, а также решить обратную задачу. Определить суммарное сопротивление дороги преодолеваемое авто во время движения с заданной скоростью. При оценке движения возможно несколько случаев: 1) линия ψ1 пресекается с кривой динамического фактора в одной точке, тогда V1 – макс скор для данных условий.
Скорость авто соответствующая максимальному значению дин факт на прямой передаче называется критической по условию тяги. С помощью динам. характер. можно опред. мах скорость движения а/м в заданных условиях, а также дать хар-ки движ-я машины при различных суммарных сопротивлениях дороги, при этом возможно несколько случаев:
-линия ψ1 пересекается с кривой динам-го фактора, тогда мах скорость дв-я для данных условий будет V1, т.к. при этом соблюд-ся условие Da = ψ
-линия ψ2 проходит ниже кривой дин-го фактора, в этом случае Da >ψ и равномерное движ-е а/м невозможно, т.к происходит разгон.
-линия ψ3 проходит выше кривой дин-го фактора, при этом Da ψ а/м может разгон-ся при движ-и со скор-ю меньше V2 или больше V3, машина будет двиг-ся только с замедлением (на одной данной передаче)
Понятие устойчивости транспортной машины. Поперечная устойчивость машины. Условие опрокидывания ТиТТМО на автомобильном шасси. Критические скорости движения специальной автомобильной техники на повороте.
Под устойчивостью колесной или гусеничной машины понимается ее способность двигаться в разнообразных условиях без опрокидывания и без бокового скольжения колес всех осей автомобиля или одной из них. В зависимости от направления опрокидывания и скольжения различают продольную и поперечную устойчивость. Более вероятно и более опасно потеря поперечной устойчивости, α выражается в заносе или боковом опрокидывании машины. Поперечная устойчивость машины – способность сохранять заданное движение без опрокидывания, сползания, заноса при движении на повороте, а так же при боковом перемещении и сползании на уклоне.
 Машина совершающая поворот вокруг оси ОО подвергается воздействию центробежной силы, α может вызвать опрокидывание или занос. Центробежная сила определяется: Рц=ma*va 2 /R=Ga* va 2 /(R*g), где ma – масса авто, кг; R – радиус поворота, м. Условием опрокидывания автомобиля относительно точки А будет след. выражение: Рφ≥ Рц. Начало опрокидывания возникает тогда, когда опрокидывающий момент будет равен моменту, удерживающему, т.е. Рц*hц= Ga*В/2, где hц – высота до центра тяжести машины, м; В – величина колеи машины, м. Рц = Ga*В/(2*hц), Ga* va 2 /(R*g)= Ga*В/2 hц, следовательно максимальная (критическая) скорость движения авто на повороте, при α начнется опрокидывание, определяется: Vакр=(gRB/(2hц)) 1/2 . Начало бокового скольжения может возникнуть тогда, когда сцепная сила станет меньше или равной силе центробежной, т.е. Рц≥ Рφ= Ga*φ. Определим максимальную (критическую) скорость движения авто, при α начнется боковое скольжение Ga*φ= Ga* va 2 /(R*g), следовательно Vакр=(gR φ) 1/2 . Поперечная устойчивость колесной или гусеничной машины характеризуется величинами предельных углов-косогоров, при α машины могут передвигаться, не опрокидываясь. Движение гусеничной машины на дороге с поперечным уклоном α рассмотрим на рисунке.
Машина совершающая поворот вокруг оси ОО подвергается воздействию центробежной силы, α может вызвать опрокидывание или занос. Центробежная сила определяется: Рц=ma*va 2 /R=Ga* va 2 /(R*g), где ma – масса авто, кг; R – радиус поворота, м. Условием опрокидывания автомобиля относительно точки А будет след. выражение: Рφ≥ Рц. Начало опрокидывания возникает тогда, когда опрокидывающий момент будет равен моменту, удерживающему, т.е. Рц*hц= Ga*В/2, где hц – высота до центра тяжести машины, м; В – величина колеи машины, м. Рц = Ga*В/(2*hц), Ga* va 2 /(R*g)= Ga*В/2 hц, следовательно максимальная (критическая) скорость движения авто на повороте, при α начнется опрокидывание, определяется: Vакр=(gRB/(2hц)) 1/2 . Начало бокового скольжения может возникнуть тогда, когда сцепная сила станет меньше или равной силе центробежной, т.е. Рц≥ Рφ= Ga*φ. Определим максимальную (критическую) скорость движения авто, при α начнется боковое скольжение Ga*φ= Ga* va 2 /(R*g), следовательно Vакр=(gR φ) 1/2 . Поперечная устойчивость колесной или гусеничной машины характеризуется величинами предельных углов-косогоров, при α машины могут передвигаться, не опрокидываясь. Движение гусеничной машины на дороге с поперечным уклоном α рассмотрим на рисунке.
 Из условия равновесия машины относительно нижней боковой кромки левой гусеницы (т.О) получим Gтрsin α hц — Gтрcos α*0.5(B+b)=0. Начало опрокидывания машины вокруг точки О произойдет в момент, когда Z1=0, при этом получим Gтрsin α hц = Gтрcos α*0.5(B+b), где В – величина колеи, м; b– ширина гусеницы, м. Предельный угол поперечного уклона, при α начнется опрокидывание определяется по tg угла, tg α = (0,5(В+b))/ hц, следовательно чем больше В и в, и меньше hц, тем устойчивее машина. Опрокидывание машины может предшествовать ее сползание, если соблюдается следующие условие Рφ=γ1+ γ2 0 .
Из условия равновесия машины относительно нижней боковой кромки левой гусеницы (т.О) получим Gтрsin α hц — Gтрcos α*0.5(B+b)=0. Начало опрокидывания машины вокруг точки О произойдет в момент, когда Z1=0, при этом получим Gтрsin α hц = Gтрcos α*0.5(B+b), где В – величина колеи, м; b– ширина гусеницы, м. Предельный угол поперечного уклона, при α начнется опрокидывание определяется по tg угла, tg α = (0,5(В+b))/ hц, следовательно чем больше В и в, и меньше hц, тем устойчивее машина. Опрокидывание машины может предшествовать ее сползание, если соблюдается следующие условие Рφ=γ1+ γ2 0 .
Центробежная сила, действующая на автомобиль при движении его на повороте, может вызвать боковой занос или опрокидывание автомобиля. Заносу автомобиля противодействует сила бокового сцепления колес с дорогой, а опрокидыванию — момент от веса автомобиля.
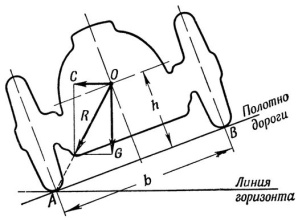 На рис. представлена схема движения автомобиля при повороте на дороге с уклоном, направленным наружу от центра поворота (наименее благоприятный случай).
На рис. представлена схема движения автомобиля при повороте на дороге с уклоном, направленным наружу от центра поворота (наименее благоприятный случай).
Обозначив центробежную силу через C, приложим ее к центру тяжести автомобиля; принимаем вес автомобиля равным G и направим его из этой же точки вертикально вниз. Опрокидывание автомобиля может наступить лишь в том случае, когда точка пересечения равнодействующей этих двух сил R с землей выйдет за пределы ширины автомобиля АВ. Противодействие боковому заносу определяется силой сопротивления, равной G φ1 , где φ1 — коэффициент бокового сцепления колеса с дорогой (практически равный φ — коэффициенту продольного сцепления).
Для обеспечения хорошей устойчивости b/2h > 1, где b — колея, h — высота центра тяжести. Боковой занос возможен, когда C ≥ G · φ1
Боковое скольжение наступает раньше опрокидывания, поэтому при потере устойчивости обычно начинается боковой занос, который может в некоторых случаях привести к опрокидыванию.
Потеря устойчивости автомобиля происходит обычно при заносе задней оси, так как центробежная сила, вызывающая занос этой оси, усиливает его при начавшемся скольжении колес.
Кроме высоты центра тяжести, на устойчивость автомобиля влияет также его положение по отношению к передней и задней осям и относительно продольной оси симметрии автомобиля.
Понятие управляемости колесной машины. Зависимость углов поворота управляемых колес ТиТТМО на автомобильном шасси. Условие качения управляемых колес без скольжения. Понятие критической скорости по условиям управляемости. Понятие бокового увода и поворачиваемости машины.
 Управляемостью колесной машины называется совокупность свойств конструкции, обеспечивающих сохранение ее движения по траектории, заданной управляемыми колесами. Управляемость колесной машины зависит от кинематических связей м/у управляемыми колесами, осуществляемых рулевой трапецией, увода колеса, стабилизацией и колебаний управляемых колес. В идеальном случае при повороте вес колеса, вращающегося без бокового скольжения и без боковых деформаций шин показаны на рис. В этом случае мгновенный центр поворота (т.О) находится на пересечении перпендикуляра к направлению движения всех колес. Передние управляемые колеса отклоняются от нейтрального положения на различные углы α наружный и α внутренний, т.к. при повороте машины они находятся на различных расстояниях от центра поворота при этом должно соблюдаться следующее условие: ctgαнар.- ctgαвнутр.=2а/L. Соблюдение этого условия обеспечивается рулевой трапецией, конструкция α с достаточным приближением позволяет поворачивать управляемые колеса на неодинаковые углы при больших углах поворота. Если данное условие не соблюдается, т.е. управляемые колеса поворачиваются на равные углы, то движение колесной машины при повороте будет сопровождаться боковым скольжением направляющих колес. В машинах повышенной проходимости, где управляемые колеса одновременно являются и ведущими, толкающие силы передних колес не дают боковых составляющих, стремящихся отклонить колесо от заданного направления.
Управляемостью колесной машины называется совокупность свойств конструкции, обеспечивающих сохранение ее движения по траектории, заданной управляемыми колесами. Управляемость колесной машины зависит от кинематических связей м/у управляемыми колесами, осуществляемых рулевой трапецией, увода колеса, стабилизацией и колебаний управляемых колес. В идеальном случае при повороте вес колеса, вращающегося без бокового скольжения и без боковых деформаций шин показаны на рис. В этом случае мгновенный центр поворота (т.О) находится на пересечении перпендикуляра к направлению движения всех колес. Передние управляемые колеса отклоняются от нейтрального положения на различные углы α наружный и α внутренний, т.к. при повороте машины они находятся на различных расстояниях от центра поворота при этом должно соблюдаться следующее условие: ctgαнар.- ctgαвнутр.=2а/L. Соблюдение этого условия обеспечивается рулевой трапецией, конструкция α с достаточным приближением позволяет поворачивать управляемые колеса на неодинаковые углы при больших углах поворота. Если данное условие не соблюдается, т.е. управляемые колеса поворачиваются на равные углы, то движение колесной машины при повороте будет сопровождаться боковым скольжением направляющих колес. В машинах повышенной проходимости, где управляемые колеса одновременно являются и ведущими, толкающие силы передних колес не дают боковых составляющих, стремящихся отклонить колесо от заданного направления.

 Боковой увод колеса и поворачиваемость машины.Пневматическая шина при сравнительно небольшом давлении является эластичным элементом и не может воспринять поперечные силы не меняя своего направления движения. Под действием силы происходит боковая деформация шины, при этом средняя плоскость колеса сместиться на расстояние σш, т.о. колесо будет катиться не под не α углом к своей средней плоскости. Точки 1,2,3,4, отмеченные на продольной оси колеса, в определенный момент времени будут смещаться вправо, оставляя отпечатки на линии 1 ” , 2 “ , 3 ” ,4 ” . Величина угла увода будет возрастать с увеличением боковой силы и будет различной для шин с жестким и мягким кордом. На участке Оа скольжение отсутствует и зависимость можно считать линейной. На участке ав эта зависимость не меняется, ввиду частичного проскальзывания шин. При значении Рб=Gк*φ увод переходит в полное скольжение и зависимость характеризуется горизонтальной линией вс. Между боковой силой и углом увода на участке Оа существует зависимость Рб=Кув.*σув., где σув- угол увода в 0 , Кув – коэф-нт сопротивления боковому уводу шин. Кув изменятся в широких пределах и зависит от конструкции шины, давления в ней, слойности корда, размера и т.д. Боковой увод шин оказывает большое влияние на управляемость ав-ля, т.к. при движении на повороте действие составляющей центробежной силы вызовет боковую деформацию шин. Боковая деформация шин и увод всей машины в сторону возможен и при прямолинейном движении под действием бокового ветра, наклона дороги и т.д. Рассмотрим поворот колесной машины с учетом бокового увода шин. Под действием боковой силы в общем случае углы увода шин передних и задних колес имеют различную величину. Углы увода шин каждой оси можно считать одинаковыми. При повороте машины с жесткими колесами боковой увод отсутствует и машина совершает поворот с радиусом R вокруг мгновенного центра поворота О. Радиус поворота определяется: R=L/tgα. при малых значениях угла поворота tgα=α, следовательно R=L/α. Однако в результате увода шин, движение колес передней и задней осей отклоняются от траектории, по α они бы двигались, в случае отсутствия увода передняя ось машины будет двигаться вдоль вектора υ1, направленного под углом α-σ1 продольной оси машины, а задняя ось вдоль вектора υ2, направленного к оси под углом σ2. Мгновенный центр поворота машины переместиться при этом в т.О1, лежащую на пересечении перпендикуляра к векторам скорости υ1 и υ2, а радиус поворота определяется по формуле: R ” =L/(tg(α-σ1)+tgσ2). Учитывая, что углы увода передней и задней оси не значительны, и средний угол поворота на больших скоростях также не велик то можно считать R ” =L/(α-σ1+σ2). Если углы увода передних и задних колес равны, то боковой увод шин не оказывает значительного влияния на радиус поворота и его величина не изменяется, но смещается мгновенный центр поворота. Если угол увода σ1>σ2, то и R ” >R, при одновременном смещении центра вращения поворот будет осуществляться по более пологой кривой, чем при жестких колесах. Если σ1 ” ” =R, то машина обладает нейтральной или нормальной поворачиваемостью. 2. σ1>σ2, то и R ” >R, то авто обладает недостаточной поворачиваемостью. 3. σ1 ” 2 );Pa = Рабочее давление
Боковой увод колеса и поворачиваемость машины.Пневматическая шина при сравнительно небольшом давлении является эластичным элементом и не может воспринять поперечные силы не меняя своего направления движения. Под действием силы происходит боковая деформация шины, при этом средняя плоскость колеса сместиться на расстояние σш, т.о. колесо будет катиться не под не α углом к своей средней плоскости. Точки 1,2,3,4, отмеченные на продольной оси колеса, в определенный момент времени будут смещаться вправо, оставляя отпечатки на линии 1 ” , 2 “ , 3 ” ,4 ” . Величина угла увода будет возрастать с увеличением боковой силы и будет различной для шин с жестким и мягким кордом. На участке Оа скольжение отсутствует и зависимость можно считать линейной. На участке ав эта зависимость не меняется, ввиду частичного проскальзывания шин. При значении Рб=Gк*φ увод переходит в полное скольжение и зависимость характеризуется горизонтальной линией вс. Между боковой силой и углом увода на участке Оа существует зависимость Рб=Кув.*σув., где σув- угол увода в 0 , Кув – коэф-нт сопротивления боковому уводу шин. Кув изменятся в широких пределах и зависит от конструкции шины, давления в ней, слойности корда, размера и т.д. Боковой увод шин оказывает большое влияние на управляемость ав-ля, т.к. при движении на повороте действие составляющей центробежной силы вызовет боковую деформацию шин. Боковая деформация шин и увод всей машины в сторону возможен и при прямолинейном движении под действием бокового ветра, наклона дороги и т.д. Рассмотрим поворот колесной машины с учетом бокового увода шин. Под действием боковой силы в общем случае углы увода шин передних и задних колес имеют различную величину. Углы увода шин каждой оси можно считать одинаковыми. При повороте машины с жесткими колесами боковой увод отсутствует и машина совершает поворот с радиусом R вокруг мгновенного центра поворота О. Радиус поворота определяется: R=L/tgα. при малых значениях угла поворота tgα=α, следовательно R=L/α. Однако в результате увода шин, движение колес передней и задней осей отклоняются от траектории, по α они бы двигались, в случае отсутствия увода передняя ось машины будет двигаться вдоль вектора υ1, направленного под углом α-σ1 продольной оси машины, а задняя ось вдоль вектора υ2, направленного к оси под углом σ2. Мгновенный центр поворота машины переместиться при этом в т.О1, лежащую на пересечении перпендикуляра к векторам скорости υ1 и υ2, а радиус поворота определяется по формуле: R ” =L/(tg(α-σ1)+tgσ2). Учитывая, что углы увода передней и задней оси не значительны, и средний угол поворота на больших скоростях также не велик то можно считать R ” =L/(α-σ1+σ2). Если углы увода передних и задних колес равны, то боковой увод шин не оказывает значительного влияния на радиус поворота и его величина не изменяется, но смещается мгновенный центр поворота. Если угол увода σ1>σ2, то и R ” >R, при одновременном смещении центра вращения поворот будет осуществляться по более пологой кривой, чем при жестких колесах. Если σ1 ” ” =R, то машина обладает нейтральной или нормальной поворачиваемостью. 2. σ1>σ2, то и R ” >R, то авто обладает недостаточной поворачиваемостью. 3. σ1 ” 2 );Pa = Рабочее давление
«Основы работоспособности технических систем»
Источник статьи: http://poisk-ru.ru/s20936t14.html