- Virtual Wind Tunnel
- Тесты в аэродинамической трубе заменяют компьютерным моделированием
- Как я продувал машину в виртуальной трубе.
- Халявная аренда виртуальной трубы 🙂
- RF 2.02 Аэродинамика
- Результаты испытаний:
- Ход испытаний
- Виртуальная аэродинамическая труба xflr 5 с нуля шаг за шагом (по мотивам горе-документации) ( mikele _ p @ mail 333 com ) кемерово 15 апреля 2009г
- Описание XFLR5
- Первый запуск XFLR5
- Программа непосредственной разработки профилей (Foil Direct Design)
- Обратная разработка профилей (XFoil Inverse Design)
- Непосредственный анализ профилей (XFoil Direct Analysis)
- Анализ единичных поляр
- Групповой анализ поляр
- Разработка и анализ крыльев(Wing Design)
- Определение геометрии крыла
- Определение фюзеляжа модели
- Определение аэродинамической схемы модели
- Определение и расчет неуправляемых поляр модели
- Определение и расчет управляемых поляр модели
- Анализ летных характеристик
- Модель крыла
- Модель самолета
- Проектирование модели
- Первичная настройка модели
- Анализ качества модели
- Подбор центра тяжести
- Подбор параметров горизонтального оперения
- Подбор профиля крыла
- Скорость полета
- Литература
Virtual Wind Tunnel


HyperWorks Virtual Wind Tunnel отличается эффективным использованием нескольких технологий Altair, включая современные методы создания конечно-элементной сетки и моделирование динамики жидкости с высокой точностью, и интуитивно понятными, автоматизированными и рационализированными рабочим процессом и пользовательским интерфейсом. Благодаря этим особенностям HyperWorks Virtual Wind Tunnel позволяет провести оценку внешних аэродинамических характеристик автомобиля на новый уровень точности и скорости.
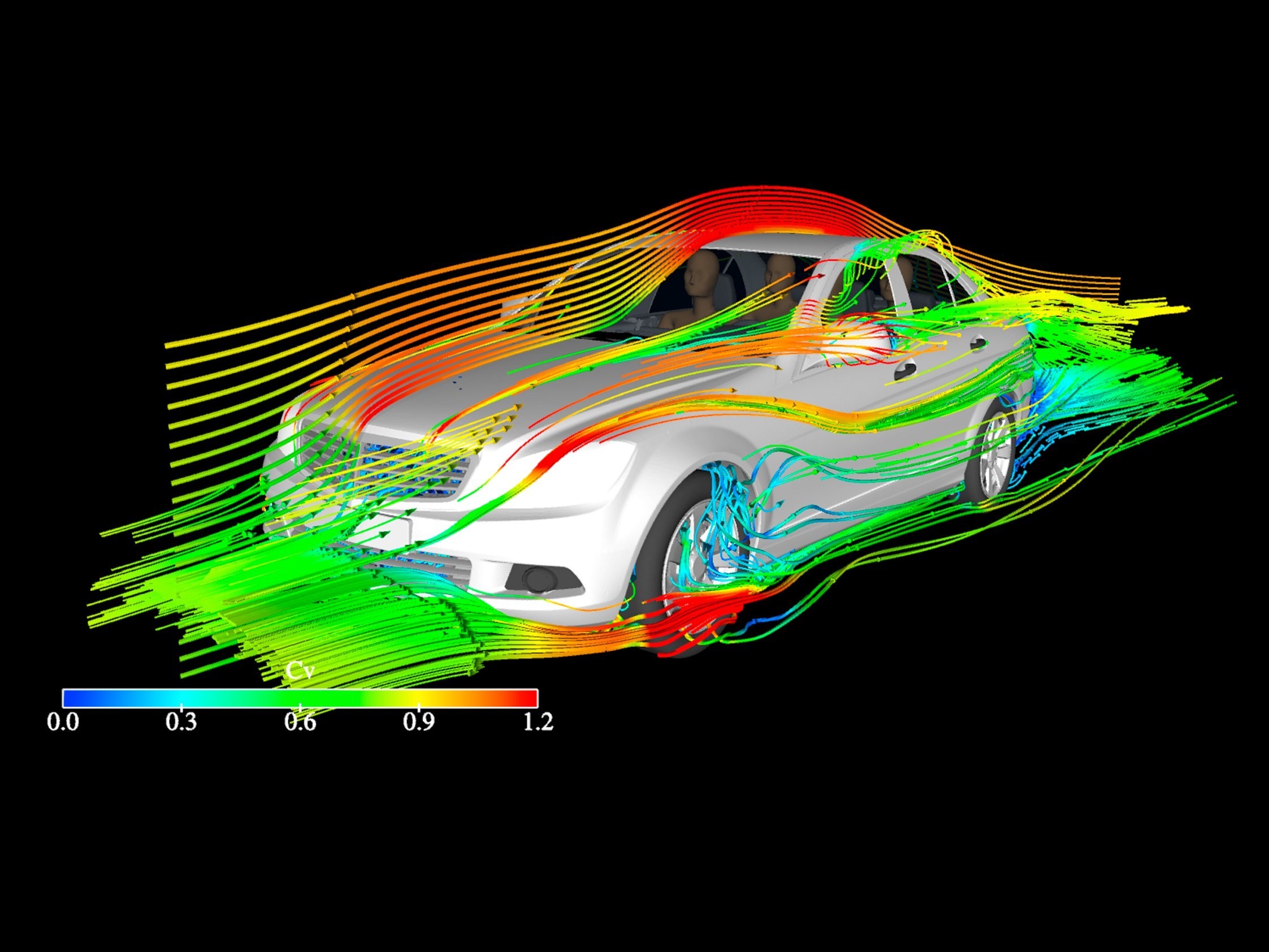
Моделирование обтекания внешним потоком играет важную роль в проектировании современных транспортных средств. Расход топлива, устойчивость транспортного средства, охлаждение двигателя, шум внутри салона автомобиля и эффективность работы стеклоочистителей – все это зависит от аэродинамических сил, воздействующих на движущийся автомобиль. Моделирование потока в аэродинамической трубе с применением методов вычислительной гидродинамики (CFD) позволяет инженерам изучать аэродинамические нагрузки. Использование этих методов также позволит сократить число необходимых натурных экспериментов в процессе разработки нового транспортного средства.
 |  |
| Конечно-элементная модель для расчета в Virtual Wind Tunnel | Визуализация потоков воздуха, обтекающих автомобиль и смоделированных в системе Virtual Wind Tunnel |
В основе нового программного обеспечения лежит AcuSolve, CFD-решатель Altair, который был выбран за его скорость, масштабируемость, надежность и точность. Передовые технологии моделирования турбулентности AcuSolve позволяют HyperWorks Virtual Wind Tunnel быстро и точно прогнозировать поле обтекания и срыв потока для статических и переменных во времени процессов. Лучшее в своем классе решение для моделирования взаимодействия жидкости и твердого тела от AcuSolve делает доступным более реалистичное и полностью автоматическое моделирование аэродинамической трубы.
Еще одно преимущество HyperWorks Virtual Wind Tunnel заключается в использовании современных методов создания КЭ сетки. Программная система Virtual Wind Tunnel предлагает пользователю полностью автоматизированный инструмент для построения сетки с учетом важнейшего в аэродинамике пограничного слоя. Создание объемной КЭ сетки для аэродинамического анализа автомобиля – включая наружние элементы шасси, обвес и создание пограничного слоя – может быть полностью выполнено менее чем за два часа. CFD решатель, лежащий в основе HyperWorks Virtual Wind Tunnel, достаточно нетребователен к геометрии конечных элементов элементов, в нем предусмотрена дополнительная возможность работы с элементами, близкими к вырожденным, генерирование которых практически неизбежно при работе со сложной геометрией. Гибкость решателя исключает трудоемкий этап оптимизации сетки, значительно сокращая время, необходимое расчетчику для ее создания.
Преимущества использования Virtual Wind Tunnel
Создание конечно-элементной сетки:
* Возможность задать уровень «мелкости» сетки
* Возможность определения зон/объёмов для автоматического уменьшения размеров элементов (refinement)
* Доступные пользователю настройки для построение сетки пограничного слоя
* Построение сетки пограничного слоя только в необходимых зонах, что позволяет уменьшить общее количество элементов в модели
* Прогрессивные методы построения сетки пограничного слоя для работы со сложной геометрией
Настройки модели:
* Возможность задания вращения колес, зон радиаторов
* Опция задания движущейся платформы в аэродинамической трубе
* Автоматическое вычисление площади миделя
Решатель:
* Наличие всех лучших решений от AcuSolve
* Низкая требовательность к качеству конечных элементов
* Высокие возможности масштабируемости (подобие потоков) даже для КЭ сеток с относительно небольшим количеством узлов
* Моделирование турбулентности
Обработка результатов анализа:
* Автоматическое генерирование отчета, включающее в себя набор результатов для разных расчетных моделей, статистические данные по КЭ сетке, коэффициент лобового аэродинамического сопротивления и т.д.
Узнать больше о возможностях программной системы Virtual Wind Tunnel можно, посмотрев данное видео:
Источник статьи: http://www.hyperworks.compmechlab.ru/article/virtual_wind_tunel_information
Тесты в аэродинамической трубе заменяют компьютерным моделированием
Автопроизводители постепенно отказываются от проведения тестов своих автомобилей в аэродинамической трубе в пользу компьютерного моделирования.
Главное преимущество работы в виртуальной среде — возможность улучшать аэродинамику автомобиля уже на этапе проектирования. Это ускоряет процесс разработки дизайнов с низким сопротивлением воздушным потокам, уменьшает затраты и позволяет получить более точные результаты.
Компания Exa разработала программный пакет Powerflow, который взяли на вооружение ведущие автопроизводители, в том числе Tesla, Jaguar Land Rover, BMW, Ford и Volkswagen. Программа позволяет моделировать воздушные потоки, безошибочно выявляя слабые места в конструкции. Аэродинамика серийных автомобилей Jaguar XE, XF и F-Pace была частично или полностью разработана в виртуальной среде с использованием Powerflow.
Tesla тоже пользуется софтом Exa. Генеральный директор Tesla Элон Маск собирается снизить коэффициент аэродинамического сопротивления (Cx) Model 3 до 0,21 к следующему году. Для сравнения, у Mercedes-Benz C-Class Cx равен 0,24, у BMW 3 Series — 0,27, а у Jaguar XE — 0,26.
С помощью компьютерного моделирования уже разработали сложные системы активной аэродинамики: закрывающиеся фальшрадиаторные решетки, динамичные антикрылья и изменяемую геометрию кузова. Сейчас ведущие компании работают над снижением Cx ниже границы 0,2. Добиться этого удалось пока только на шоу-каре Mercedes Concept IAA (Cd=0,19) и лимитированном Volkswagen XL1 (Cd=0,189).
Для комментирования вам необходимо авторизоваться
Источник статьи: http://www.kolesa.ru/news/testy-v-aerodinamicheskoj-trube-zamenyayut-kompyuternym-modelirovaniem
Как я продувал машину в виртуальной трубе.
Халявная аренда виртуальной трубы 🙂
Очень полезно периодически изучать сайты компаний — производителей программного обеспечения. Например, несколько лет назад мне посчастливилось раздобыть тестовую версию виртуальной Аэродинамической трубы Autodesk Falcon. Программа в тот момент проходила открытое тестирование и Autodesk предлагал ее бесплатно скачивать с условием ограниченного по времени некоммерческого использования.
Falcon мне тогда очень понравился своей простотой и эффективностью, да и эффектностью тоже. Все было очень просто — загружаешь 3d модель в формате .stl, выставляешь скорость и направление ветра и, пожалуйста, начинай продувку!
Для меня это было тогда актуально, потому как я проектировал свой собственный автомобиль для трек-дней RockFoxie (рендер приведен наверху) и мне очень хотелось, чтобы все было по-настоящему — с расчетами, продувками итд.
В качестве иллюстрации, привожу свою статью, описывающую тот занимательный опыт по горячим следам:
RF 2.02 Аэродинамика
Виртуальная аэротруба Autodesk Falcon позволила детально изучить аэродинамические характеристики прототипа RockFoxie 2.02. Изображение демонстрирует результат «продувки», происходившей в течении реального 1 часа 46 минут и виртуальных 81 долей секунды со скоростью потока 56.6 м/с (200 км/ч), направленного вдоль продольной оси автомобиля.
Результаты испытаний:
- Cd = 0.34 — коэффициент лобового сопротивления (среднее значение).
- Df = 989.794N = 100,9кГ — сила аэродинамического сопротивления.
- Lf = 84.466N = 8,6кГ — подъемная сила.
- Vmax = 59.483 м/с — максимальная скорость воздушного потока.
- Pmax = 1056.890 Па — максимальное давление воздушного потока.
Я очень доволен результатами испытаний. Коэффициент лобового сопротивления для автомобиля с открытыми колесами — просто прекрасный! Следует учесть, что для RockFoxie — это первое аэродинамическое испытание. Тщательно проанализировав результаты, можно оптимизировать воздушные потоки и значительно улучшить аэродинамику. Уже сейчас можно с уверенностью сказать, что выступающий между сидений фрагмент хребта нуждается в доработке (красная зона).
Ход испытаний
Испытание продолжалось 1 час 46 минут реального времени. Здесь я представляю несколько скриншотов, демонстрирующих ход виртуальной продувки.
00:00:00. 7я сотая доля секунды виртуального процесса.
Начало продувки. Давление приходится на носовой обтекатель.
00:30. 14я сотая доля секунды виртуального процесса.
Численные данные Cd, Df, Lf близки к окончательным результатам, но картина распределения и значения давления, а также скорость потока — недостоверны.
05:45. 28я сотая доля секунды виртуального процесса.
Начинают формироваться синусоиды. Самая большая амплитуда (зеленая кривая) — подъемная сила. Нижний виток синусоиды характеризуется максимальным значением Cd и минимальным (отрицательным) значением подъемной силы.
08:17. 30я сотая доля секунды виртуального процесса.
Верхний виток синусоиды характеризуется минимальным коэффициентом сопротивления и максимальной подъемной силой. Минимальный из замеченных Cd=0,12!
38:37. 44я сотая доля секунды виртуального процесса.
Синусоиды сформированы. Амплитуды идут на уменьшение. Видно, что для сглаживания кривых требуется только время.
1:46:36. 81я сотая доля секунды виртуального процесса.
После 1 часа 46 минут синусоиды сгладились. Значения Cd, Df, Lf становятся постоянными. Констатируем завершение виртуальной продувки. Получаем результаты — очень достойные!
Вот такая получилась история.
В настоящий момент, наработки Autodesk Falcon использованы Autodesk в программном пакете Fluid Design. Студенты и преподаватели могут пользоваться им бесплатно, а для всех прочих доступна годовая лицензия по цене 210$ в год.
Источник статьи: http://zen.yandex.ru/media/turbo/kak-ia-produval-mashinu-v-virtualnoi-trube-5a92e65af4a0ddd42f7a5590
Виртуальная аэродинамическая труба xflr 5 с нуля шаг за шагом (по мотивам горе-документации) ( mikele _ p @ mail 333 com ) кемерово 15 апреля 2009г
Описание XFLR5
Тем, кто хочет узнать, какими методами производится расчет и прочие тонкости, рекомендую обратиться к документации из поставки Guidelines.pdf. Обычно же задача моделиста-самоучки, как всегда, начать моделировать с места в карьер.
Прежде чем начать работать с XFLR5 необходимо провести небольшую подготовку:
1. Запастись текстовыми файлами данных (*.dat) с координатным описанием всех используемых профилей несущих и стабилизирующих поверхностей в проектируемой Вами модели, за исключением профилей NACA, которые программа умеет генерировать сама. Формат файлов такой:
Например, фрагмент описания профиля Clark Y будет выглядеть как:
Лучше всего иметь под рукой программу Profil2, из которой в любой момент можно выгрузить имеющийся профиль.
2. Прикинуть, хотя бы отдаленно, какие будут пропорции и основные размеры модели. Для примера, возьмем набросок одного из описаний (XFLR5-tut-v1.pdf):
— размах крыла — 1200 мм
— корневая хорда — 180 мм
— концевая хорда — 120 мм (смещение 60 мм)
— поперечное V — 0 градусов
— размах руля высоты – 360 мм
— корневая хорда – 100 мм
— концевая хорда – 80 мм (со смещением 20 мм)
Вертикальный стабилизатор и фюзеляж пока не ставим, т.к. это только пример.
3. Предположить, что же вы ожидаете от модели?
Раз уж мы «грабим» чужие описания, то пусть это будет планер.
Как видно из рисунка, XFLR5 даже по такому отдаленному описанию уже (в модуле анализа крыльев) может посчитать нам полезные данные:
— Размах (Wing span) – 1200 мм
— Площадь крыла (Wing area) – 18 Кв. Дм
— Коэффициент статической продольной устойчивости (Tail volume, или дословно «Значение горизонтального оперения») – 1,16 (величина безразмерная)
— Корневая хорда (Root chord) – 180 мм
— Средняя аэродинамическая хорда (M.A.C.) – 152 мм
— Концевая крутка (Twist at tip) – 0 градусов
— Удлинение крыла (Aspect ratio) – 8
— Сужение крыла (Taper ratio) – 1,5
— Стреловидность (Rt-tip sweep) – +4,3 градуса
Первый запуск XFLR5
Н аконец запускаем XFLR5, и видим, что на самом деле XFLR5 это не одна программа, а собранный воедино пакет из четырех программ подготовки, моделирования и анализа модели самолета:
1. Программа непосредственной разработки профилей (Foil Direct Design), которая позволяет хранить библиотеку используемых нами профилей, загружать извне, создавать свои или модифицировать имеющиеся профили.
2. Обратная разработка профилей (XFoil Inverse Design), позволяющая, взяв за пример какой-то из профилей, изменением графика распределения давления на верхней и нижней кромке, менять сам профиль.
3. Непосредственный анализ профилей (XFoil Direct Analisis), позволяющий анализировать поляры профилей, заданных в первом приложении, при разных углах атаки, числах Рейнольдса и т.д.
4. Разработка и анализ крыльев(Wing Design), позволяющая на основе данных предыдущих компонент проводить полный анализ летных качеств модели, включая управляемые режимы полета.
Программа непосредственной разработки профилей (Foil Direct Design)
В принципе, эта часть программы практически очевидна. В верхней части окна отображаются профили из имеющегося набора (при том, по-умолчанию все скопом). В нижней – перечисление всех профилей текущего проекта XFLR5. Отображение отдельного профиля можно добиться, отключив отображение каждого из «ненужных» профилей (флажок «Show Foil»).
Чтобы произвести импорт из файла профилей (*.dat), выбираем пункт меню File\Load file. При этом профиль будет загружен и добавлен в список.
Основная работа по модификации профиля ведется в меню Foil. Расскажу только о значениях того, чего сообразил. Интерфейс достаточно прост. После пары упражнений все встанет на места:
Если импортированный файл не нормализован, т.е. значения координат по оси X НЕ находятся в пределах от 0 до 1, то это исправляется выбором команды Normalize.
De-rotate – определяет линию хорды профиля и разворачивает профиль так, чтобы она лежала горизонтально. Или иначе, строится линия, соединяющая самые дальние точки между лобиком и хвостиком профиля, и затем профиль разворачивается так, чтобы эта линия лежала горизонтально, тем самым выставляя профиль в нулевой угол атаки.
Edit coordinates – позволяет редактировать координаты профиля вручную
Scale camber and thickness – позволяет скорректировать значения относительной толщины и кривизны профиля.
Set T.E. Gap – изменение толщины задней кромки профиля. (Для своих целей я не нашел применение этой команды. Подозреваю, что она понадобится для проектирования фактических конструктивных несводимых в ноль кромок).
Scale L.E. radius – изменение радиуса носика профиля.
Set Flap – определение положения и угла отклонения закрылков. Используется для расчета управляемого полета.
Interpolate foils – получение промежуточного профиля по двум заданным.
NACA foils – генератор профилей NACA. Для определения профиля нужно задать его номер, например, 0009 или 23015.
Обратная разработка профилей (XFoil Inverse Design)
К сожалению, не освоил я этой компоненты. Так что могу только сказать, что она есть. Надеюсь, для более опытного моделиста, желающего разработать собственный профиль, этот инструмент окажется необходим.
Непосредственный анализ профилей (XFoil Direct Analysis)
Анализ поляры профиля, хоть и является одним из основных моментов, но все-таки является вспомогательным этапом перед анализом самого крыла и в дальнейшем всей модели самолета. Что же касается самого анализа поляр, то его, по-моему, проще и нагляднее делать в программе Profili2. Однако попытку можно сделать и здесь.
Анализ единичных поляр
Для проведения анализа поляры профиля, ее необходимо сначала задать и рассчитать. Для задания единичной поляры используйте пункт меню Polars\Define Analysis/Polar.
Как видно из диалогового окна, поляры бывают четырех типов.
Первый тип, это изменение коэффициента подъемной силы и лобового сопротивления в зависимости от угла атаки при постоянном числе Рейнольдса. Поэтому для задания этой поляры вводим необходимое число Рейнольдса. Остальные переменные – это параметры необходимые самому алгоритму расчета (я предпочитаю их не трогать).
После того, как будут заданы необходимые для анализа поляры, необходимо провести расчет. Для этого в правой части основного окна зададим:
— переменную для изменения (угол атаки — альфа);
— минимальный (Start = -5) , максимальный (End = 15) угол атаки и его шаг (дельта = 0,5).
И нажмем «Analyze».
Программа поддерживает два режима построения графиков (переключение кнопками панели инструментов):
1. Распределение давлений по поверхности профиля
2. (для нас более интересный) Отображение аналитических графиков.
А теперь я скажу вещь, которая неочевидна при самостоятельном изучении, хоть и в меню отражена: Если навести курсор мыши на график и нажать на клавиатуре клавишу « V », то появится диалоговое окно, позволяющее выбирать любые переменные для отображения на осях графика. Основные выбираемые значения:
— Alpha – угол атаки
— Cl – коэффициент подъемной силы ( Cy )
— Cd – коэффициент лобового сопротивления ( Cx )
— XCp – положение центра давления
— Cl / Cd – аэродинамическое качество профиля
Групповой анализ поляр
Групповой анализ поляр необходим для того, чтобы на основе полученных данных можно было проводить анализ желаемого крыла конечного удлинения. Выберем пункт меню Polars\Run batch analysis
Этот режим нам также позволяет выбрать необходимый тип поляр, но в отличии от одиночного, число Рейнольдса расчета поляр может быть введено, либо промежутком расчета (минимальное, максимальное и шаг), либо задано списком. Для анализа крыла список задавать полезнее, т.к. после некоторого большого значения Re шаг можно увеличить, значительно сократив время расчета поляр.
Далее задарим пределы изменения угла атаки Alpha (минимальное, максимальное и шаг) и нажимаем «Analyze».
Этот групповой расчет поляр необходимо провести для всех выбранных Вами профилей для модели.
Разработка и анализ крыльев(Wing Design)
Вот, наконец, и приступаем к самому интересному: созданию нашей модели самолета.
Для того, чтобы было проще понять, делать мы его будем в несколько этапов. В дальнейшем, когда начнете создавать свою модель, можете некоторые этапы пропускать.
Определение геометрии крыла
Для начала зададим крыло, для этого выберем пункт меню Wing/Plane\Define a wing. На экране появится диалоговое окно ввод крыла.
В принципе все интуитивно понятно.
1. В верхней части окна указывается:
— наименование крыла (это для того, чтобы не путаться, в случае если мы хотим опробовать несколько крыльев и/или моделей);
— определение будет ли наше крыло симметричным или нет (используется при расчете управляемых поляр, например по углу отклонения элеронов), соответственно задается определение для каждой консоли.
— Остальные параметры рассчитываются из заданной геометрии.
Wing span – получившийся размах крыла
Area – площадь крыла
Volume – объем крыла
Mean geom. chord – средняя геометрическая хорда (т.е. как правило то что в моделизме посчитано по упрощенной формуле и называется САХ)
Mean aero. chord – средняя аэродинамическая хорда (видимо считается как-то посложнее)
MAC span position – положение размаха САХ.
Aspect ratio – удлинение крыла
Taper ratio – сужение крыла
Root to tip sweep – стреловидность
Number of flaps – количество определенных закрылков (элеронов). Используется для расчета управляемых поляр.
Total VLM panels – параметр определяющий количество элементов для VLM-метода расчета аэродинамики крыла. Как правило, его изменять не нужно. Уменьшать это число приходится тогда, когда суммарное количество панелей всей модели зашкаливает за 2000 штук, например при расчете бипланов со сложной геометрией крыльев и фюзеляжа.
2. Таблица, содержащая параметры для каждой из панелей консоли. Значения столбцов таковы:
— Pos (mm) – положение расположения нервюры, определяющей геометрию крыла (корневой, концевой, промежуточной на которой меняется стреловидность и/или поперечное V и/или крутка)
— Chord (mm) – длина хорды выбранной нервюры
— Offset (mm) смещение относительно носика корневой нервюры. Может быть и положительным и отрицательным (для обратной стреловидности).
— Dihedral (градусов) – угол V-отклонения от горизонтальной плоскости
— Twist (градусов) – угол крутки выбранной нервюры
— Foil name – наименование профиля указанной нервюры (выбирается из списка ранее созданных и/или загруженных в проект XFLR5 профилей)
— X-panels – количество панелей по оси X для метода 3D-панелей. Иногда приходится уменьшать, чтобы хоть что-то рассчиталось, т.к. метод позволяет создать только 2000 панелей на всю модель.
— X-dist – горизонтальное распределение панелей по консоли. (как правило не трогаю, т.к. в некоторых случаях поляры перестают рассчитываться)
-Y-panels – количество панелей по оси Y для метода 3D-панелей
-Y-dist – горизонтальное распределение панелей по консоли.
Для задания геометрии крыла расчетов неуправляемого (однорежимного полета) достаточно указать в таблице
1. расположения нервюр;
2. величины длин и смещений хорд каждой части консоли
3. значения поперечного V для каждой части консоли крыла.
4. профиль крыла каждой части.
Например, как на иллюстрации ниже:
Для определения геометрии крыла для расчета управляемого полета дополнительно необходимо:
1. в модуле непосредственной разработки профиля (Foil Direct Design) задать параметры закрылков (Меню Foil\Set Flap), тем самым образовав новые измененные профили. Например, как на иллюстрации ниже определены закрылки с отклонением в -7 градусов на 70% длины хорды профиля NACA 1410. Значение отклонения (т.е. 7 градусов) определит максимальное значение для управляемого параметра (Control parameter) при расчете управляемой поляры. (Детальнее работа с закрылками будет рассмотрена при построении управляемых поляр.)
Учтите, что элероны, закрылки руль высоты и направления начнутся не от корневой нервюры, а значит, какая-то часть консоли крыла будет без установки механизации. Для учета этой особенности вам необходимо задавать, кроме профиля с отклоненным «закрылком», еще и профиль с таким же «закрылком», только установленным на отклонение 0 градусов. Например, как в случае с NACA 1410 на рисунке выше, где определено четыре профиля: исходный, с закрылком на 70% и отклонением +7 градусов, с закрылком на 70% и отклонением -7 градусов, с закрылком на 70% и отклонением 0 градусов.
2. рассчитать набор поляр для образовавшихся новых профилей в модуле непосредственного анализа профилей (XFoil Direct Analysis).
3. задать дополнительно для каждой нервюры, с которой начнется и которой закончится «закрылок», две схожие с троки с разными профилями крыла, например:
Тем самым мы задали опущенный на 7 градусов закрылок-элерон, расположенный на расстоянии от 420 до 690 мм от корневой хорды.
Абсолютно аналогичным образом определяются параметры геометрии стабилизаторов.
Определение фюзеляжа модели
Одним из важных моментов при анализе модели является определение геометрии фюзеляжа. В проекте для одной модели можно задать несколько разных фюзеляжей, которые могу быть использованы для анализа.
Начинаем с того, что выбираем пункт меню Body design\ New body. По этой команде открывается окно дизайнера фюзеляжей. Окно состоит из трех частей:
1. в верхней левой части экрана расположена проекция вида слева и изометрия фюзеляжа, по которой можно просто сориентироваться, как будет выглядеть фюзеляж.
2. в правой верхней части изображено текущее сечение фюзеляжа, с которым мы работаем.
3. в нижней части окна расположены параметры фюзеляжа – это: откидной список выбора редактируемого фюзеляжа; кнопки выбора Flat panels / B-splines, определяющее будут ли сечения представлены прямымы линиями или в виде гладкой кривой; таблица о значениями параметра X в которых строятся сечения фюзеляжа и таблица YZ координат точек выбранного в первой таблице сечения.
По умолчанию само сразу задается некое подобие фюзеляжа, видимо для того, чтобы было легче понять, как его редактировать. Для редактирования нам необходимо, либо менять цифровые параметры таблиц нижней части экрана, либо при помощи манипулятора «мышь» «перетаскивать» узлы сечения. Разработчики не предусмотрели создание фюзеляжа «с нуля», при удалении «заготовки», создать новый набор точек для фюзеляжа не получается.
Для того, чтобы облегчить создание собственного фюзеляжа, необходимо сразу указать на этой заготовке места необходимых сечений. Если фюзеляж должен состоять из криволинейных гладких обводов, то добавить промежуточные сечения, иначе рискуем получить «рубленные» контуры, однако учитывайте, что все «творческие потуги» затем будут рассчитываться VLM-методом, который иногда оказывается не в состоянии рассчитать сложное движение потока.
Далее работаем непосредственно с координатами точек сечений: для получения лучшего внешнего вида количество вершин по всем сечениям должно быть одинаковым, иначе визуализатор начинает «тупить», а также точки сечений не должны накладываться, создавая VLM-панели нулевой площади.
Определение аэродинамической схемы модели
Для начала зададим крыло, для этого выберем пункт меню Wing/Plane\Define a plane. Если необходимо провести редактирование параметров модели, то в меню Wing/Plane \ Current Wing/Plane имеется ряд функций: Edit – редактирование, Delete – удаление и т.д.
Параметры диалогового окна таковы:
Name – наименование вашей модели. Желательно задавать, т.к. при наличии в одном проекте нескольких моделей (и не дай бог схожих или модификаций одной и той же) может затруднить понимание того, с какой моделью работаем. Поверьте, проверял на себе.
Группа элементов Main wing определяет основное крыло модели. Крыло можно задать (как в описании команды Define wing) по кнопке Define. Если вы уже ранее определили крыло командой Define wing, то его можно импортировать в модель кнопкой Import. Координата X – определяет, насколько далеко от «носа» модели будет расположено крыло. Координата Y – насколько выше. Tilt angle – определяет угол установки крыла.
Группа Biplane позволяет вам задать второе крыло, если вы проектируете биплан. Основные параметры этой группы определяются, также как в группе Main wing.
Группа Elevator – определяет горизонтальное оперение. Не забывайте определять профиль оперения. Как правило, я ставлю NACA 0008.
Группа Fin – задает вертикальное оперение. При этом флажок Symetric fin – определяет стабилизатор симметрично горизонтальной оси. Флажок Double fin позволяет задать два стабилизатора, а то, на сколько стабилизаторы будут отстоять от продольной оси, определяется координатой Y.
Группа Boby – позволяет выбрать фюзеляж модели из ранее заданных.
Определение и расчет неуправляемых поляр модели
Если все параметры модели или анализируемого вами крыла были заданы верно, то можно переходить к анализу. Надеюсь, вы не забыли рассчитать группы поляр для всех выбранных вами профилей.
Выберите пункт меню определения поляр Polars\Define polar analysis. На экране отобразится диалоговое окно, в котором определяются основные параметры расчета:
— Тип поляры (Polar Type) – определяет тип рассчитываемой поляры модели. Тип1 – это продувка модели потоком с постоянной заданной скоростью. Тип2 – поляра при постоянной подъемной силе. Тип3 – поляра для фиксированного угла набегания потока.
— Скорость потока (Free stream speed) – определяет скорость потока для поляры 1-го типа.
— Вес модели (Plane weight) – задает вес модели для проведения расчетов.
— Положение центра тяжести (Mom ref location) – определяет центр тяжести для расчета моментов.
— Угол атаки (Angle of attack)
— Угол бокового потока (Side Slip)
После определения параметров рассчитываемой поляры и нажатия на «Ok», на основном окне определим, для каких углов атаки будет рассчитана наша поляра, и нажмем «Analyze».
После того, как поляра будет рассчитана, на экран можно вызвать режим отображения графиков и задать необходимые зависимости, указав по клавише «V» необходимые значения на осях:
Опишу те, которые понял сам:
— Alpha – угол атаки
— Lift coef – коэффициент подъемной силы
— Viscous drag coef – сопротивление давления
— Inducted drag coef – индуктивное сопротивление
— Total drag coef – лобовое сопротивление (равно Viscous drag coef + Inducted drag coef)
— Total pitching moment coef – суммарный момент тангажа относительно центра тяжести
— Total rolling moment coef – суммарный момент крена относительно центра тяжести
— Total yawing moment coef – суммарный момент рыскания относительно центра тяжести
— Viscous yawing moment coef – вязкий момент рыскания
— Inducted yawing moment coef – индуктивный момент рыскания
— Glide ratio Cl/Cd – качество крыла (Сy/Сx)
— Power factor Cl^(3/2)/Cd – Коэффициент мощности крыла
— Lift – подъемная сила (в ньютонах)
— Drag – Лобовое сопротивление (в ньютонах)
— Vx – Скорость по оси X
— Vy – Скорость по оси Y
— Vz – Скорость по оси Z
— Vinf – к сожалению, не понял что
— Descent angle atan(Cd/Cl) – угол планирования
— Pitching moment – момент тангажа крыла относительно центра тяжести
— Rolling moment — момент крена крыла относительно центра тяжести
— Yawing moment – момент рыскания крыла относительно центра тяжести
— Center of pressure X-Pos – X координата центра давления
— Center of pressure Y-Pos– Y координата центра давления
— Bending moment – к сожалению, не понял значения
— m. g. Vz – к сожалению, не понял значения
— Oswald – к сожалению, не понял значения
— (Xcp-Xcg)/MAC – положение центра давления относительно центра тяжести в долях САХ.
— Control Variable – управляемая переменная (для управляемой поляры)
— Cy Lateral force coef – к сожалению, не понял значения
Обычно для поляры 2-го типа я строю графики:
1. Total pitching moment coef от Vx, чтобы посмотреть, на какой скорости получим стабилизацию модели (при GCm = 0).
2. Alpha от Vx – чтобы посмотреть при какой скорости угол атаки для всей модели станет равным нулю (Alpha = 0)
3. Glide ratio Cl/Cd от Vx — скорость при которой будет происходить наивысшее качество планирования (максимум Cl/Cd), и постараться подогнать скорость стабилизации под наивысшее качество планирования.
4. Vz от Vx – на какой горизонтальной скорости снижение при планировании будет с минимальной скоростью (минимуму Vz) (т.е. наиболее экономичный режим, удачный для посадки, например)
Для этого в пункте меню Operating point\Graphs выбираем пункт Four graph для отображения сразу четырех графиков и, наводя на каждый курсор «мыши» и нажимая «V», зададим графики
Определение и расчет управляемых поляр модели
Расчет управляемой поляры отличается от неуправляемой тем, что:
1. Расчет производится только для сбалансированного полета, т.е. тех значений управляемого параметра, при которых суммарный момент (Total pitching moment) будет равным нулю.
2. Перед расчетом необходимо задать «закрылки» несущих поверхностей
Расчет производится для двух типов поляр – это Тип 5 (При постоянной скорости потока), Тип 6 (При постоянной подъемной силе). Как видно из иллюстрации, то, какой параметр будет изменять управляющая переменная, зависит от значения «1» в поле Active (1/0), т.е. можно одновременно взаимосвязано управлять сразу несколькими параметрами.
Параметры для управления:
— XCmRef (m) – управляет положением центра тяжести, позволяет, оптимизировать его положение. Минимальное и максимальное значение указывается в метрах (m), но, по-моему, это зависит от текущих настроек.
— Wing tilt (градусов) – управляет углом установки крыла
— Elevator tilt – углом установки горизонтального оперения
— Wing flap angle 1..N – управляет углами отклонения соответствующих закрылков/элеронов рыла
— Elevator flap angle 1..N – управляет углами отклонения рулей высоты
Управлять рулем направления у меня не вышло, равно, как и заставить меняться графики моментов по крену и рысканию.
После определения параметров самой поляры можно переходить к анализу данных. Отличие будет заключаться в том, что при анализе мы уже задаем не изменение угла атаки, а изменение контрольного значения t. Параметр t меняется в пределах от 0 до 1, тем самым, заставляя выбранные аэродинамические параметры меняться в заданных полярой значениях. Шаг изменения параметра t можно, при необходимости, уменьшить.
Анализ графиков рассчитанной поляры производится точно так же, как и в случае с неуправляемой.
Анализ летных характеристик
А теперь перейдем от описания интерфейса программы XFLR5 к самому интересному – анализу летных качеств модели. Как в голос говорят все статьи про XFLR5, расчеты — расчетами, но все расчеты нужно практикой проверять.
Начнем, как всегда, с самого простого, т.е. с характеристик крыла.
Модель крыла
1. С помощью непосредственной разработки профиля (Foil direct design) зададим профиль крыла NACA 23012 (NACA foils), а с помощью непосредственного анализа (XFoil direct analysis) рассчитаем поляры Типа 1 с числами Рейнольдса от 10000 до 500000. Лучше, конечно, сделать это с применением описанной ранее последовательности, но можно и просто с шагом 10000, для углов атаки от -7 до 18 градусов с шагом 0,5.
2. Используя модуль разработки крыльев (wing design) зададим крыло (Define wing):
— Корневая хорда – 240 мм
— Концевая хорда – 160 мм
— Смещение хорды – 24 мм
— угол поперечного V – 5 градусов.
3. Теперь зададим поляру Типа 1, где скорость потока равна 10 м/сек, центр тяжести расположен на передней кромке крыла. Вес пусть будет 500 грамм.
И проанализируем ее при углах атаки от -7 до 20 градусов с шагом 0,5.
Классическую поляру крыла можно увидеть, если задать зависимость Cl от Cd, т.е. коэффициента подъемной силы от коэффициента лобового сопротивления, но из этой зависимости без дополнительных построений мало что можно увидеть сразу.
Для анализа крыла построим графики зависимостей:
— Total pitching moment coef от Alpha – момент тангажа от угла атаки
— Cl/Cd от Alpha – аэродинамическое качество от угла атаки
— Сl от Alpha – коэффициент подъемной силы от угла атаки
— Lift от Alpha — сама подъемная сила от угла атаки.
Для скорости полета 10 м/сек (т.е. для скорости указанной в поляре) из первого графика видно, что стабилизация произойдет, когда суммарный момент (GCm) станет равным нулю, т.е. когда угол атаки (УА) будет где-то в районе -2 градусов. Из четвертого, что при УА равном -2 градуса коэффициент подъемной силы (Cl) станет слегка отрицательным, т.е. крыло само по себе никуда не летит, а даже наоборот. Из второго, что крыло летало бы с наивысшим качеством, находясь под углом атаки 5 градусов, когда качество (Cl/Cd) станет максимальным, и тем самым имело наибольшую подъемную силу при наименьшем сопротивлении. А из третьего, что даже при таком УА подъемная сила менее 5 ньютонов, т.е. в районе 480-490 грамм веса. (Все цифры из расчета крыла следует брать к сведению только и только в том случае, если мы рассчитываем летающее крыло, иначе же, как будет видно ниже, влияние стабилизатора и фюзеляжа существенно подпортят картинку.)
Что же делать? Как заставить крыло летать? Нужно обязательно увеличить угол атаки, но для этого нужно, чтобы сумма всех моментов равнялась нулю, иначе полет станет невозможным. Модель всегда будет менять угол атаки, для случая устойчивой стабилизации возвращаясь к точке стабильности с ее углом атаки, в противном случае переходя к самопроизвольному вращению в потоке.
Изменением положения центра тяжести мы никак не повлияем на график зависимости подъемной силы от угла атаки или на аэродинамическое качество, но, может быть, изменим угол стабильного полета? Что будет, если мы, например, переместим центр тяжести назад? Может оно полетит?
Строим еще две поляры с центрами тяжести расположенном в 50 мм и 75 мм.
Как видно из графика, если центр тяжести поместить в 75 мм от передней кромки, то стабилизация наступит при УА равном 2 градуса. При таком УА крыло будет иметь положительную подъемную силу. Крыло летит, но крыло находится в неустойчивом равновесии, т.е. если мы немного увеличим угол атаки, положительный момент заставит крыло еще сильнее задрать нос и т.д., а если уменьшим УА, то отрицательный момент его еще сильнее уменьшит. Не полет, а сущая морока, которая гарантированно закончится встречей с поверхностью.
Чтобы заставить крыло летать само по себе можно:
— воспользоваться S-образным профилем, который сам себя стабилизирует;
— поиграться со стреловидностью и отрицательной круткой концевых хорд.
Основной же вывод в том, что момент тангажа, созданный профилем крыла, необходимо чем-то компенсировать до нуля.
4. Теперь построим поляру крыла Типа 2 для массы 500 грамм и центром тяжести в нуле.
И проанализируем ее для углов атаки от -5 до 17 градусов, построив графики:
— Total pitching moment coef от Vx, чтобы посмотреть, на какой скорости получим стабилизацию модели (при GCm = 0).
— Alpha от Vx – чтобы посмотреть при какой скорости угол атаки для всей модели станет равным нулю (Alpha = 0)
— Glide ratio Cl/Cd от Vx — скорость при которой будет происходить наивысшее качество планирования (максимум Cl/Cd), и постараться подогнать скорость стабилизации под наивысшее качество планирования.
— Vz от Vx – на какой горизонтальной скорости снижение при планировании будет с минимальной скоростью (минимуму Vz) (т.е. наиболее экономичный режим, удачный для посадки, например)
Из первого графика видно, что стабильность полета отдельно самого крыла так и не достигается. Из второго, что угол атаки равный нулю будет достигнут на скорости 17 м/сек. Из третьего, что наивысшее аэродинамическое качество будет на скорости 11 м/сек. Из четвертого, что сажать самолет с такими аэродинамическими характеристиками без тяги мотора приятнее будет на скорости 8-9 м/сек и скорость снижения будет 0.60 – 0.70 м/сек. Сваливаться же он будет при 7 м/сек, т.к. на этой скорости уже происходит срыв потока.
Модель самолета
Проектирование модели
Чем же можно компенсировать момент, образованный крылом, имеющим несамостабилизирующий профиль? Вводим новый элемент: горизонтальное оперение (ГО).
Используя модуль разработки крыльев (Wing design) зададим модель (Define plane).
Крыло (Main wing):
— Корневая хорда – 240 мм
— Концевая хорда – 160 мм
— Смещение хорды – 24 мм
— Угол поперечного V – 5 градусов.
— Расположено со смещением – 0 мм вверх, 0 мм назад.
Горизонтальное оперение (Elevator):
— Корневая хорда – 120 мм
— Концевая хорда – 90 мм
— Смещение концевой хорды – 20 мм
— Расположен со смещением – 550 мм назад, 40 мм вверх
Вертикальное оперение (Fin):
— Корневая хорда – 120 мм
— Концевая хорда – 60 мм
— Смещение концевой хорды – 50 мм
— Расположен со смещением – 550 мм назад, 40 мм вверх
Теперь построим поляру крыла Типа 2 для массы 500 грамм и, для начала, поместим центр тяжести в нуле. И проанализируем ее для углов атаки от -5 до 17 градусов, построив графики:
— Total pitching moment coef от Vx, чтобы посмотреть, на какой скорости получим стабилизацию модели (при GCm = 0).
— Alpha от Vx – чтобы посмотреть при какой скорости угол атаки для всей модели станет равным нулю (Alpha = 0)
— Glide ratio Cl/Cd от Vx — скорость при которой будет происходить наивысшее качество планирования (максимум Cl/Cd).
— Vz от Vx – на какой горизонтальной скорости снижение при планировании будет с минимальной скоростью (минимуму Vz).
Желтым обозначены графики для крыла, красным для нашей модели. Как мы видим, при таких углах установок крыла и стабилизатора:
— Стабильный полет, в таком режиме, наступит только при скорости 24 м/сек.
— Несущие качества снизились из-за необходимости постоянной «борьбы» с пикирующим моментом крыла.
— Угол нулевого отклонения фюзеляжа будет достигнут при скорости 18 м/сек.
То есть модель самолета при таких углах установки не летает в горизонтальном полете при скоростях эквивалентных здравому смыслу.
Вот тут-то не лишне вспомнить статьи про постройку моделей собственными руками, где в итоге модель никто и никак не триммировал в горизонтальный полет. Лукавят черти. Или просто «всю дорогу» тянут ручку руля высоты.
Первичная настройка модели
Что же можно сделать? Модель-то по-прежнему, как и крыло отдельно, не летает. Варианта два: либо увеличивать угол установки крыла, либо уменьшать угол установки горизонтального оперения (ГО).
Для начала необходимо определиться, на какой скорости хотелось бы иметь горизонтальный полет. Например, для моделей планеров скорость стабилизированного полета выставляют равной скорости наивысшего качества планирования. Для моторных моделей, думаю, будет далеко не лишним ориентироваться на «любимую» скорость полета, либо на скорость нулевого отклонения фюзеляжа.
Сделаем первую ошибку: изменим угол установки основного крыла с 0 на +3 градуса. Для этого вызовем редактор модели (Wing\Plane / Current wing\plane / Edit…)
И проанализируем поляру заново.
Результат уже получше: стабильный полет происходит при 15 м/сек. Однако свальная скорость чуть увеличилась, а вот угол атаки всей модели при скорости 15 м/сек стал отрицательным на пару градусов, т.е. самолет летит не горизонтально, а чуть опустив нос. Конечно 2 градуса это, как говорится, ни о чем, но все-таки фюзеляж уже может дать большее лобовое сопротивление. Кстати о фюзеляже: все тонкие настройки углов лучше проводить, смоделировав в XFLR5 еще и фюзеляж модели, иначе у нас «поплывут» все характеристики.
Теперь вернем угол установки крыла в ноль и уменьшим угол установки горизонтального оперения до -3 градусов, и пересчитаем поляру.
Результат практически тот же, только теперь нос модели будет приподнят в полете.
Какой из вариантов изменения углов установки лучше? Думаю, оба по отдельности не очень хороши. Все будет зависеть от ситуации. Придется либо все устанавливать в ноль и выправлять в полете рулем высоты, либо подбирать оба угла. Разнообразие подбора углво велико, так, например, для самолета АН-2 углы установки верхнего крыла +3 градуса, нижнего +1 градус, горизонтального оперения -1 градус.
Дальше в примерах будем использовать вариант, когда крыло установлено под углом +1 градус, а оперение -1 градус. Ни в коем случае не забываем, что все настройки углов зависят от расположения центра тяжести, а также аэродинамики фюзеляжа.
Анализ качества модели
А с чего мы вообще взяли, что профиль NACA23012 нам подходит? И с чего взяли, что центр тяжести у передней точки крыла это хорошо? И что горизонтальное оперение нас устраивает? И на какой скорости будет летать самолет?
Подбор центра тяжести
Проведем расчет поляр для центра тяжести, установленного: у передней кромки крыла (0 мм), в 15% САХ (42 мм), в 25% САХ (62 мм), в 35% САХ (82 мм). Все графики у нас совпадут за исключением момента тангажа от скорости.
По графикам видно, что расположение центра тяжести модели в пределах 42 – 62 мм мы получаем стабильный полет при скорости около 10 м/сек и то, что при заходе в пике, когда скорость будет возрастать выше 10 м/сек, модель будет сама стремиться выйти из него выйти. (Вот здесь следует оговориться, что это только для текущего режима полета. Для других режимов полета необходимо все пересчитать.)
Обратите внимание, что, смещая центр тяжести назад для сохранения той же самой скорости стабильного полета, придется изменять угол установки горизонтального оперения так, чтобы кривая «опустилась» ниже и пересекла ось Vx. При этом угол наклона кривой по отношению к оси будет меньше, т.е. реакция модели на изменения станут слабее, а модель, соответственно, менее устойчива.
Как советуют в литературе, если хотите получить что-то удовлетворяющее конкретно вас, то лучше подбирать график устойчивости такой же, как у тех моделей, которые летают, на ваш взгляд, хорошо.
Подбор параметров горизонтального оперения
Актуальная тема для планеров, но не особо актуальная для парк-флаеров. Как было видно на много ранее, после того как мы ввели горизонтальное оперение (ГО), аэродинамическое качество модели резко снизилось. Чтобы уменьшить влияние ГО на аэродинамическое качество – уменьшают площадь ГО и относят его подальше от крыла.
Рассмотрим на примере нашей модели. Сделаем ее копию (Wing\Plane / Current wing\plane / Duplicate) и изменим геометрию ГО:
— Корневая хорда – 100 мм
— Концевая хорда – 80 мм
— Смещение концевой хорды – 20 мм
Построим поляру для ЦТ в 62 мм и проанализируем ее.
Голубым цветом обозначены графики исходной модели, красным пунктирным – измененной. Как видно, качество подросло немного, но не значительно. Для моделей планеров она подрастает значительно. А по графику момента тангажа видно, что стабильность ухудшилась, т.к. график стал положе.
Предлагаю вам самим проверить, что если сместить уменьшенное ГО назад до отметки 70 см, то качество останется прежним, а стабильность практически сравняется с исходной.
Подбор профиля крыла
В литературе есть на это только намек, но, думаю, стоит попробовать подобрать профиль крыла. Так как мы начали экспериментировать с профилем 12% толщины, то и продолжим с ними же. Возьмем Clark Y. Пересчитаем поляру для того же ЦТ и веса модели. (график красной пунктирной линией)
Результат – существенное ухудшение качества планирования крыла данной формы с профилем Clark Y при скоростях выше 8 м/с (т.е. график ниже исходного), но улучшение качества при малых скоростях полета.
Вывод следующий: Для данной формы крыла профиль NACA 23012 подходит лучше, чем Clark Y, для полетных скоростей. Но при посадке, при переходе ко вторым режимам полета, Clark Y более плавно теряет аэродинамическое качество. Для другой формы крыла (или крыла с другим удлинением) может оказаться совсем иначе. Получается это потому, что крылья разной формы и работают при разных условиях, например, разных числах Рейнольдса или из-за разного удлинения получаются разные индуктивные сопротивления.
Скорость полета
Предлагаемый метод, конечно, приблизительный, т.к. приходится исходить из того, что: модель у нас сделана из абсолютно гладких материалов; тяга мотора постоянна и никак не зависит от скорости полета. Т.е. это в большей мере относится к электромоторам.
И так, пусть у нас имеются данные о статической тяге двигателя на нулевой скорости и скорости воздушного потока, например, для электромотора TowerPro 2410-08 (840 оборотов в минуту/вольт):
— с пропеллером 9*4.7 тяга равна 650 грамм при скорости потока 18,3 м/сек;
— с пропеллером 8*6 тяга равна 520 грамм при скорости потока 23,4 м/сек.
Как определить, с каким из пропеллеров модель полетит лучше? Самое простое – поставить на модель и запустить. Но мы пойдем расчетным способом.
1. Исходя из предположения, что пропеллер у нас крутится при одинаковых оборотах на любой скорости полета, получаем, что для пропеллера 9*4.7 при нулевой скорости полета тяга будет 650 грамм или 9.8(Н/Кг)*0.650(Кг)=6.37(Ньютон). На скорости полета в 18,3 м/сек пропеллер будет вращаться так, что, ввинчиваясь в воздух, уже никак не будет отбрасывать его назад, т.е. тяга будет равна нулю. Для пропеллера 8*6 равна 5.1 (Н) при скорости ноль, и ноль при скорости 23,4 м/с.
2. Построим график зависимости лобового сопротивления (Drag) от скорости полета (Vx).
3. Нанесем на него прямые для обоих пропеллеров. Это уже придется сделать где-то в графическом редакторе или на бумаге. Красная линия для пропеллера 9*4.7, голубая – пропеллер 8*6.
Как видно из графика, пересечение соответствующих линий показывает, что наша модель (не имеющая фюзеляжа) с пропеллером 9*4.7 на полном газу будет летать со скоростью 17 м/с, а с пропеллером 8*6 – около 21 м/с.
Учтите, что это частный случай, что пропеллер с большим шагом теоретически позволит нам развить большую скорость. Может случиться так, что, из-за большого лобового сопротивления модели, пропеллер с большей статической тягой позволит модели развивать большую скорость. А так же, что всё это теория, которая может и не совпасть с практикой. Проще бывает даже воспользоваться для расчета скорости, например, MotoCalc-ом.
Литература
1. Guidelines for XFLR5 v4.07 (July, 2008)
2. Martin Willner: A tutorial for XFLR5 version 1
3. Владимир Васильков, Константин Бочков: Несущие крылья
4. A. Deperrois: About performance and stability analysis using XFLR5 (July 2008)
5. Учебник аэродинамики (автор неизвестен, т.к. когда-то скачал из интернета)
Источник статьи: http://textarchive.ru/c-2513812-p2.html